
Page 270 - 《振动工程学报》2025年第11期
P. 270
幅值
−2
−4
时间
2728 振 动 工 程 学 报 第 38 卷
误差信号的波形
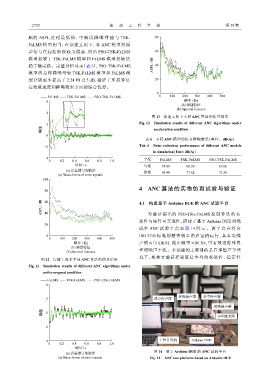
频的 ASPL 达 到 最 低 值 , 中 频 段 降 噪 性 能 与 TSK- 80
FxLMS 模型相当;在加速工况下,各 ANC 模型的误
差信号在起始阶段较为振荡,而后 PSO-TSK-FxLMS 60
模型相较于 TSK-FxLMS 模型和 FxLMS 模型是最快
趋于稳定的。定量分析显示(表 6),PSO-TSK-FxLMS ASPL / dB 40
模型的总体降噪量较 TSK-FxLMS 模型和 FxLMS 模
型分别至少提高了 2.24 和 12.5 dB,验证了所提算法 20
在收敛速度和降噪效果方面的综合优势。
0
0 100 200 300 400 500
FxLMS TSK-FxLMS PSO-TSK-FxLMS
6 频率 / Hz
(b) 频谱特征
(b) Spectral features
4
图 13 加速工况下不同 ANC 算法的仿真结果
2 Fig. 13 Simulation results of different ANC algorithms under
幅值 acceleration condition
0
表 6 不同 ANC 模型的仿真降噪效果(单位:dB(A))
−2 Tab. 6 Noise reduction performance of different ANC models
in simulation(Unit: dB(A))
−4
0 0.2 0.4 0.6 0.8 1.0 工况 FxLMS TSK-FxLMS PSO-TSK-FxLMS
时间 / s 匀速 79.89 69.30 67.06
(a) 误差信号的波形 加速 84.40 77.62 71.90
(a) Wave-forms of error signals
100
4 ANC 算 法 的 实 物 仿 真 试 验 与 验 证
80
ASPL / dB 40 4.1 构建基于 Arduino DUE 的 ANC 试验平台
60
为 验 证 提 出的
控 制 算 法 的 有
PSO-TSK-FxLMS
效性与硬件可实现性,搭建了基于 Arduino DUE 的低
20
成本 ANC 试 验 平 台 如 图 14 所 示 。 该 平 台 在 符 合
0 ISO 3745 标准的精密级半消声室内运行,其本底噪
0 100 200 300 400 500
频率 / Hz 声值≤15 dB(A),截止频率≤80 Hz,可有效消除外界
(b) 频谱特征
(b) Spectral features 环境噪声干扰。本试验的主要目的是在理想声学环
境下,聚焦于验证控制算法本身的收敛性、稳定性
图 12 匀速工况下不同 ANC 算法的仿真结果
Fig. 12 Simulation results of different ANC algorithms under
uniform-speed condition
FxLMS TSK-FxLMS PSO-TSK-FxLMS
4
次级扬声器 参考传声器
2 误差传声器
初级扬声器
幅值 0 功率放大器
−2
−4 上位计算机 Arduino DUE
0 0.2 0.4 0.6 0.8 1.0
时间 / s
图 14 基于 Arduino DUE 的 ANC 试验平台
(a) 误差信号的波形
(a) Wave-forms of error signals Fig. 14 ANC test platform based on Arduino DUE
频率
频谱特征