
Page 266 - 《振动工程学报》2025年第11期
P. 266
2724 振 动 工 程 学 报 第 38 卷
t s (14)
f (t) = ∫ 0 t|e(t)|dt
2 提 出 的 PSO-TSK-FxLMS 算 法 式中,e(t) 为误差信号;t s 为控制参数或适应度函数
趋于稳定的时间,单位为 s。
由式(9)可知:a、b 和 c 是影响 e (n)的重要系数, 该适应度函数由控制开始到当前稳态时刻的绝
′
其参数调优是提升 ANC 系统性能的关键环节。为 对误差信号值的累加和计算得出,表征在此时间段
自适应调整这 3 个控制系数以获取更优的 ANC 降噪 内 ANC 系统的累计控制误差;对于每个粒子而言,
效果,引入搜索速度快的 PSO 算法,提出基于 PSO- 在对应的参数下运行一段时长的 ANC 仿真,该过程
TSK-FxLMS 的 ANC 参数优化方法,流程如图 3 所示。 的时间绝对误差积分即为其适应度值,而 PSO 算法
的优化目标是寻找能使该累积误差最小化的参数
随机初始化种群参数
组合。
(3)计算每个粒子的适应度,更新个体和粒子群
设置增益参数的优化范围
的最佳适应度;若当前粒子适应度值优于其历史最
运行基于TSK-FxLMS算法的ANC 优值,则更新个体最优解及其对应适应度;若同时优
模型,并定义适应度函数
于群体历史最优值,则同步更新全局最优解及群体
更新粒子的速度与位置,
计算个体和群体的最优位置 最优适应度。
得到新的群体
(4)判断当前迭代次数是否满足终止条件,若满
判断是否达到 N 足则停止迭代,执行步骤(6),否则执行步骤(5)。
迭代条件
(5)更新粒子的速度和位置,得到新的群体;同
Y
输出增益系数的优化结果 时返回步骤(2)开始新一轮迭代。速度和位置的更
新公式为:
图 3 基于 PSO-TSK-FxLMS 算法的 ANC 参数优化
Fig. 3 ANC parameter optimization process based on PSO- v i+1 = ωv i +θ 1 r 1 (p best − x i )+θ 2 r 2 (g best − x i ) (15)
TSK-FxLMS algorithm
x i+1 = x i +v i+1 (16)
(1)随机初始化种群,设定增益系数的解集范 式中, x i+1 和 v i+1 为更新的粒子位置和速度; ω为惯性
围、惯性权重初始值、种群规模、粒子的速度 v ma 和 权重; θ 1 和 θ 2 为学习因子; 和 为区间 [0,1] 的随机
x
r 1
r 2
v min ,以及最大迭代次数等;随机初始化粒子的位置 数; p best 和 g best 分别为个体和群体的历史最佳位置。
x i (即增益系数 k p 、k i 和 k d )和速度 v i 。 (6)输出全局最优解,即模糊控制增益系数的最
(2)运行基于 TSK-FxLMS 算法的 Simulink 模型, 优值。
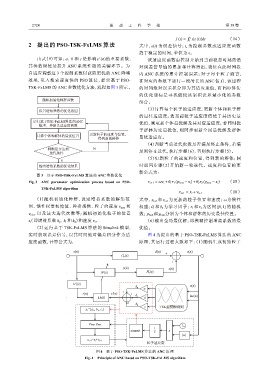
实时获取误差信号,以其时间绝对偏差积分作为适 图 4 为提出的基于 PSO-TSK-FxLMS 算法的 ANC
应度函数,计算公式为: 原理,其运行过程大致如下:(1)随机生成初始粒子
x(n) d(n) e(n)
H p (z) +
+
y(n) s(n)
W(z) H s (z)
H′ s (z) e(n)
k p
a
r(n) e′(n) + +
k i Δe(n)
LMS b
+
k d
c TSK型模糊规则
x 1 =[a 1 , b 1 , c 1 ]
p best , g best
1
simout s x
|u|
x i+1 =x i +v i+1
粒子适应度
图 4 基于 PSO-TSK-FxLMS 算法的 ANC 原理
Fig. 4 Principle of ANC based on PSO-TSK-FxLMS algorithm