
Page 264 - 《振动工程学报》2025年第11期
P. 264
2722 振 动 工 程 学 报 第 38 卷
得更加突出,例如空调噪声、电磁噪声、轮胎路噪声 该 算 法 的 平 均 降 噪 量 和 收 敛 速 度 得 到 大 幅 提 升 。
及电驱桥传动异响等 [2-3] ;在这些噪声源的综合作用 ZHANG 等 [17] 提出基于 Takagi-Sugeon-Kang 模糊控制
下,车内噪声控制问题变得更复杂。传统的减振、 的 FxLMS 改进算法(TSK-FxLMS),并以电动客车驾
吸声与隔声等被动控制措施在低频和时变噪声场景 驶区匀速和加速的车内噪声信号验证了该算法的可
[4]
下往往效果有限 。因此,基于有源消声原理的主动 行性;然而,其模糊控制器的增益参数依赖人工经验
噪声控制(ANC)方法成为解决该问题的重要途径。 设定,存在调试效率低且难以保证全局最优的问题。
在实际应用中,基于前馈自适应的 ANC 系统能 因此,本文在此基础上引入全局参数寻优能力
有效应对时变环境下的噪声控制需求 。该系统通 强且搜索速度快的粒子群优化(PSO)算法,提出基
[5]
过布置参考麦克风实时采集环境噪声信号,由自适 于 PSO-TSK-FxLMS 的 ANC 参 数 优 化 方 法 , 旨 在 构
应控制器通过算法计算并生成相位相反、幅值相等 建一种融合智能优化与模糊控制的自适应降噪框
的声波,通过次级扬声器输出,从而在目标区域实现 架,为复杂非线性 ANC 系统的参数全局优化提供可
噪声能量的主动抵消 [6-7] 。这种闭环控制系统的核心 行思路。为验证该框架的有效性,设计正交试验并
优势在于能够动态跟踪噪声源特征变化,实现频域
搭建硬件实物测试平台,通过 ANC 仿真与试验探究
[8]
内的实时噪声控制 。可见,有源前馈 ANC 系统的
其降噪性能。
关键在于控制算法,由 Burgess 推导验算的 FxLMS 算
法因具有运算量小和易硬件实现等优点已成为现有
1 TSK-FxLMS 算 法
ANC 的基准算法,该算法通过次级通道估计对参考
信号进行预滤波,计算滤波后的参考信号与误差信
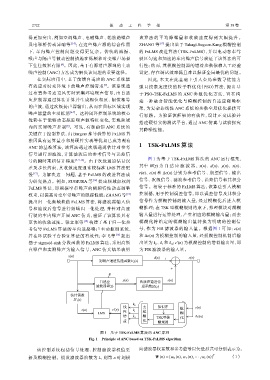
图 1 为基于 TSK-FxLMS 算法的 ANC 运行框架,
号的瞬时乘积估计梯度 [5, 9-12] 。由于次级通道估计误
差及步长约束,其收敛速度通常较标准 LMS 算法更 其中 W(z) 为 自 适 应 滤 波 器 , x(n)、 d(n)、 y(n)、 s(n)、
r(n)、e(n) 和 Δe(n) 分别为参考信号、期望信号、输出
慢 [13] 。为解决这一问题,基于 FxLMS 的改进算法成
为研究热点。例如,SUGIURA 等 [14] 提出频域加权的 信号、次级信号、滤波参考信号、误差信号和其积分
FxLMS 算法,即根据窄带噪声的幅频特性动态调整 信号。相较于标准的 FxLMS 算法,该算法引入模糊
权重,以提高时变窄带噪声的跟踪性能;ZHANG 等 [10] 控制器,用于控制误差信号,即以误差信号及其积分
提出归一化频域块的 FxLMS 算法,将滤波器输入信 信号作为模糊控制的输入量,经过模糊化后进入模
号和滤波后信号进行频域归一化处理,并针对高速 糊推理;在 TSK 型模糊规则约束下,推理模块对模糊
行驶的车内噪声开展 ANC 仿真,验证了该算法具有 输入量进行运算处理,产生相应的模糊输出量;而去
更快的收敛速度。张立军等 [15] 构建了基于归一化参 模糊化将给定的模糊输出量转换为明确的控制信
考信号 FxLMS 算法的车内道路噪声主动控制系统, 号,作为 FIR 滤波器的输入量。根据图 1 可知:e(n)
并在环试验平台验证算法的有效性;李飞等 [16] 提出 和 Δe(n) 为模糊控制的输入量,经模糊控制机制后输
基于 sigmoid-sinh 分段函数的 FxLMS 算法,采用高斯 出量为 k p 、k i 和 k d ;e'(n) 为模糊控制的增益输出量,即
白噪声和实测噪声为输入信号,ANC 仿真结果表明 为 FIR 滤波器的输入量。
x(n) d(n) e(n)
初级声通道传递函数H p (z) +
+
自适应 y(n) 次级声通道传 s(n)
滤波器W(z) 递函数H s (z)
估计函数
H′ s (z)
k p
线 去 知识库 e(n)
r(n) e′(n) k i 模
LMS 性 模 糊
增 k d 糊 TSK型模 化 Δe(n)
益 化 糊规则
图 1 基于 TSK-FxLMS 算法的 ANC 原理
Fig. 1 Principle of ANC based on TSK-FxLMS algorithm
该控制系统包括信号处理、控制滤波器权值更 向滤波器权系数和参考信号以矢量形式可分别表示为:
新及模糊控制。假设滤波器阶数为 L,则第 n 时刻横 W (n) = [w 0 (n),w 1 (n),··· ,w L (n)] T (1)