
Page 259 - 《振动工程学报》2025年第11期
P. 259
第 11 期 张家明,等:核主泵磁流变半主动隔振及试验验证 2717
1500 动控制策略则采用天棚控制算法对 MRD 进行实时
1000 控制。仿真过程中,施加的基础正弦加速度激励幅
0.06g(此为试验验证中台架的安全振动极限),
值为
阻尼力 / N 500 0 测试值 激励频率从 10 Hz 依次增加 1~60 Hz,旨在覆盖缩比
仿真值
−500 系统的共振区并模拟实际工程中的宽频振动环境。
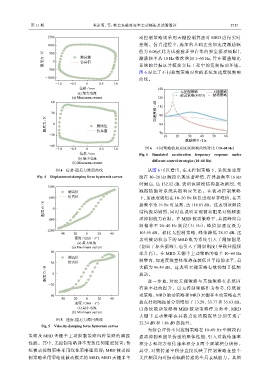
图 6 对比了不同控制策略对应的系统加速度级频响
−1000 曲线。
−1.0 −0.5 0 0.5 1.0
位移 / mm 140
(a) 最大电流 无控制策略 天棚策略
被动策略(MRD) 被动策略
(a) Maximum current 126
60 112
30 加速度级 / dB 98
阻尼力 / N 0 测试值 84
−30 仿真值 70 10 20 30 40 50 60
激励频率 / Hz
−60
−1.0 −0.5 0 0.5 1.0 图 6 不同策略的加速度级频响曲线对比 (10~60 Hz)
位移 / mm Fig. 6 Simulated acceleration frequency response under
(b) 最小电流
(b) Minimum current different control strategies (10~60 Hz)
图 4 位移-阻尼力滞回曲线 从图 6 可以看出,在无控制策略下,系统加速度
Fig. 4 Displacement-damping force hysteresis curves 级在 10~20 Hz 频段出现显著峰值,在共振频率 16 Hz
时最高,达 132.12 dB,表明该频段结构振动剧烈,无
1200
测试值 减振措施时系统共振响应突出。在被动控制策略
600 仿真值 下,加速度级仍在 10~20 Hz 频段出现显著峰值,在共
阻尼力 / N 0 振频率为 16 Hz 时最高,达 118.83 dB。这表明该频段
结构振动剧烈,同时也说明常规被动阻尼对低频振
−600 动抑制能力有限。在 MRD 被动策略下,共振峰向高
频 偏 移至 20~40 Hz 频 段 ( 31 Hz) , 峰 值 加 速 度 级 为
−1200
−40 −20 0 20 40 103.55 dB。相比无控制策略,峰值降低 28.57 dB,这
−1
速度 / (mm·s ) 表明被动状态下的 MRD 既为系统引入了附加阻尼
(a) 最大电流
(a) Maximum current (削弱了原共振峰),也引入了附加刚度(导致共振频
60 率升高)。在 MRD 天棚半主动策略的整个 10~60 Hz
测试值
30 仿真值 频带内,加速度级整体维持在较低且平稳的水平,最
大值为
96.49 dB。这表明天棚策略有效抑制了低频
阻尼力 / N 0 振动。
−30 进一步地,对比天棚策略与其他策略在系统固
有频率处的提升。以无控制策略作为参考,传统被
−60 动策略、MRD 被动策略和 MRD 天棚半主动策略在共
−40 −20 0 20 40
−1
速度 / (mm·s ) 振点处的隔振量分别增加了 13.29、33.77 和 35.63 dB。
(b) 最小电流 以传统被动策略和 MRD 被动策略作为参考,MRD
(b) Minimum current
天棚半主动策略在共振点处的隔振量分别实现了
图 5 速度-阻尼力滞回曲线
22.34 dB 和 1.86 dB 的提升。
Fig. 5 Velocity-damping force hysteresis curves
为综合评价不同控制策略在 10~60 Hz 全频段内
策略及 MRD 天棚半主动控制策略四种策略的减振 振动抑制和能量传递的整体性能,引入对数传递率
性能。其中,无控制策略即不安装任何阻尼装置;传 积分 L 和均方根传递率积分 R 两个频域积分指标。
统被动控制策略采用线性策略阻尼器;MRD 被动控 其中,对数传递率积分直接反映了控制策略在整个
制策略采用零电流被动模式的 MRD;MRD 天棚半主 关注频段内对振动幅值传递的全局衰减能力。其值