
Page 157 - 《振动工程学报》2025年第11期
P. 157
第 11 期 张仁坤,等:磁悬浮柔性转子无试重不平衡量分布优化方法 2615
试验升速 仿真升速 转频 / Hz
20 5000 250
4000 三阶弯曲模态
3000 200
15 2000 锥动刚体 一阶弯曲 二阶弯曲模态
模态
模态
位移 / μm 10 虚部 / (rad·s −1 ) 1000 0 平动刚体模态 150
工作转速区间
−2000
5 −1000 100
−3000 50
−4000
0
0 2000 4000 6000 8000 −5000 0
−1
转速 / (r·min ) −700 −500 −300 −100 100
(a) 振动测点M1位移响应 实部 / s − 1
(a) Displacement response in measurement point M1
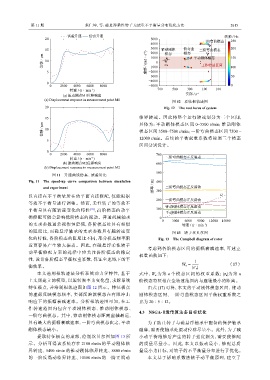
图 12 系统根轨迹图
20 Fig. 12 The root locus of system
15 临界转速。因此将整个运行转速划分为三个区间,
位移 / μm 10 具体为:平动刚体模态区间 0~3500 r/min;锥动刚体
模态区间
3500~7500 r/min;一阶弯曲模态区间
7500 ~
5 12000 r/min。后续的平衡权重系数将按照三个模态
区间分别设计。
0
0 2000 4000 6000 8000 700
−1
转速 / (r·min ) 三阶弯曲模态正反涡动
(b) 振动测点M2位移响应 600
(b) Displacement response in measurement point M2
500
图 11 升速曲线仿真、试验对比
频率 / Hz 二阶弯曲模态正反涡动
Fig. 11 The speed-up curve comparison between simulation 400
and experiment 300
以直接在不平衡量所在的平面直接修配,仅能根据 Ω
200 一阶弯曲模态正反涡动
等效不平衡量进行调整。然而,柔性转子的等效不
平衡量具有随转速变化的特性 [28] ,高阶模态的动平 100 锥动刚体模态正反涡动
平动刚体模态正反涡动
衡修配可能会影响低阶模态的振动。普通机械轴承 0
0 3000 6000 9000 12000 15000
的支承参数通常视作恒定值,各阶模态处具有相似 转速 / (r·min )
−1
的阻尼比,而磁悬浮轴承的支承参数具有随转速变 图 13 转子坎贝尔图
化的特性,各阶模态的阻尼比不同,部分模态频率附 Fig. 13 The Campbell diagram of rotor
近更容易产生较大振动。因此,在磁悬浮柔性转子
考虑到各阶模态区间的振幅衰减速率,可建立
动平衡修配方案的选择中应关注各阶模态的稳定
权重函数如下:
性,设计各阶模态平衡权重系数,保证全速域下的平
1
衡效果。 W n = |σ n | (17)
本文选用根轨迹法分析系统动力学特性,基于 式中,W n 为第 n 个模态区间的权重系数;|σ n |为第 n
上文所建立的模型,以旋转频率为变化量,求解系统 阶模态特征根在全转速范围内与虚轴最小的距离。
特征极点,并绘制根轨迹图如图 12 所示。特征极点 由式 (17) 可得,本文的平动刚体模态区间、锥动
的虚部反映模态频率,实部反映该模态在有限冲击 刚体模态区间、一阶弯曲模态区间平衡权重系数之
响应下的振幅衰减速率。分析根轨迹图可知,在工 比为 20∶5∶12。
作转速范围内包含平动刚体模态、锥动刚体模态、
4.3 NSGA-Ⅱ 遗传算法多目标优化
一阶弯曲模态。其中,锥动刚体模态距离虚轴最远,
具有最大的振幅衰减速率,一阶弯曲模态次之,平动 为了防止转子与磁悬浮轴承中配备的保护轴承
刚体模态最小。 碰摩,需要使轴承处振动位移尽量小。此外,为了减
提取特征极点的虚部,绘制坎贝尔图如图 13 所 小动平衡维修后产生的转子强度损失,需要使修配
示。分析可得该系统存在 2100 r/min 的平动刚体临 的质量尽量小。因此,本文以振动最小、修配总质
界转速、5400 r/min 的锥动刚体临界转速、8800 r/min 量最小为目标,对转子的不平衡量分布进行了优化。
的一阶反涡动临界转速、10500 r/min 的一阶正涡动 本文基于影响系数法转子动平衡原理,建立了