
Page 14 - 《振动工程学报》2025年第11期
P. 14
2472 振 动 工 程 学 报 第 38 卷
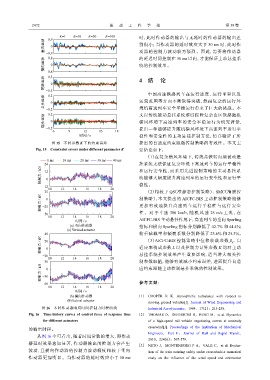
0.9 K=1 K=10 K=50 K=100 时,此时作动器的输出与无延时的作动器的输出差
垂向运动 −0.9 0 别很小;当作动器的延时效应大于 30 ms 时,此时作
动器的控制力波动较为强烈。因此,需要将作动器
0.8
横向运动 −0.8 0 的延迟时间控制在 30 ms 以内,才能保证主动悬挂系
统的控制效果。
0.3
侧滚运动 −0.3 0 4 结 论
中国高速铁路列车在运行速度、运行里程以及
0.2
点头运动 −0.2 0 运营范围等方面不断取得突破,然而复杂的运行环
境给高速列车安全平稳运行带来了巨大的挑战。本
摇头运动 0.2 0 文以传统被动悬挂系统难以保障复杂山区铁路随机
横风环境下高速列车的安全平稳运行为研究背景,
−0.2
6 9 12 15 18 提出一种能够提升随机横风环境下高速列车运行平
时间 / s 稳性和安全性的主动悬挂控制方法,仿真验证了所
图 15 不同参数 K 下的约束误差 提出的自适应约束跟随控制策略的有效性。本文主
Fig. 15 Constraint errors under different parameter K 要结论如下:
(1)在复杂横风环境下,传统高铁转向架被动悬
0 ms 10 ms 20 ms 30 ms 40 ms
24 挂系统无法保证复杂环境下高速列车的运行平稳性
控制力 / kN 12 0 和运行安全性,而采用先进控制策略的主动悬挂系
统能够大幅度提升高速列车的运行安全性和运行平
−12 10 12 14 16 18 20 稳性。
25 (2)相较于 QS(准静态控制策略)、SMC(滑膜控
控制力 / kN −25 0 制策略),本文提出的 AICFC-BIS 主动控制策略能够
更加有效地提升高速列车运行平稳性与运行安全
−50 性 。 对 于 车速 300 km/h, 随 机 风 速 25 m/s 工 况 , 在
10 12 14 16 18 20
时间 / s AICFC-BIS 主动悬挂作用下,高速列车的垂向 Sperling
(a) 垂向作动器 指标和横向 Sperling 指标分别降低了 42.7% 和 44.4%;
(a) Vertical actuator
40 轮重减载率和倾覆系数分别降低了 23.6% 和 25.3%。
控制力 / kN 20 0 适应率构成参数 L 以及控制力计算参数 K 均对主动
β ij 、自
控制策略中位移收敛参数
(3)AICFC-BIS
−20 悬挂系统控制效果产生重要影响,适当增大相关控
10 12 14 16 18 20
30 制参数取值,能够有效减小约束误差,进而提升自适
控制力 / kN −30 0 应约束跟随主动控制悬挂系统的控制效果。
−60 参考文献:
10 12 14 16 18 20
时间 / s
(b) 横向作动器 [1] COOPER R K. Atmospheric turbulence with respect to
(b) Lateral actuator
moving ground vehicles[J]. Journal of Wind Engineering and
图 16 不同作动器响应时间控制力时程曲线 Industrial Aerodynamics,1984,17(2):215-238.
Fig. 16 Time-history curves of control force of response time [2] THOMAS D,DIEDRICHS B,BERG M,et al. Dynamics
for different actuators of a high-speed rail vehicle negotiating curves at unsteady
的输出时程。 crosswind[J]. Proceedings of the Institution of Mechanical
Engineers, Part F: Journal of Rail and Rapid Transit,
从图 16 中可看出,随着时间常数的增大,即作动
2010,224(6):567-579.
器延时效果愈加显著,作动器输出的控制力会产生
[3] NETO J, MONTENEGRO P A, VALE C, et al. Evalua-
波动,且横向作动器的控制力波动幅度相较于垂向 tion of the train running safety under crosswinds-a numerical
作动器更加明显。当作动器的延时效应小于 10 ms study on the influence of the wind speed and orientation