
Page 13 - 《振动工程学报》2025年第11期
P. 13
第 11 期 凌 亮,等:强横风环境下高速列车运行安全自适应约束跟随控制 2471
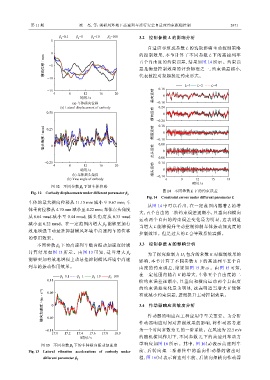
β ij =0.1 β ij =1 β ij =10 β ij =100 3.2 控制参数 L 的影响分析
5
自适应率组成参数 L 的选取影响主动控制策略
0 的控制效果,本节计算了不同参数 L 下的高速列车
横向位移 / mm −5 五个自由度的约束误差,结果如图 14 所示。约束误
差是衡量控制效果的评价标准之一,约束误差越小,
−10 代表被控对象越接近约束形式。
L=1 L=2 L=4
−15 0.18
4 8 12 16 20 垂向运动 0
时间 / s
(a) 车体横向位移 −0.18
(a) Lateral displacement of carbody 0.24
横向运动 0
0.50
−0.24
0.18
摇头角度 / mrad 侧滚运动 −0.18 0
0.25
0.08
0
点头运动 0
−0.25 −0.08
0.14
4 8 12 16 20
时间 / s 摇头运动 0
(b) 车体摇头角度 −0.14
(b) Yaw angle of carbody 6 9 12 15 18
时间 / s
图 12 不同参数 β i 下的车体位移
j
图 14 不同参数 L 下的约束误差
Fig. 12 Carbody displacements under different parameter β ij
Fig. 14 Constraint errors under different parameter L
车体的最大横向位移从 11.15 mm 减小至 9.67 mm;车
从图 14 中可以看出,在一定范围内随着 L 的增
体垂向位移从 4.70 mm 减小至 4.22 mm;车体点头角度
大,五个自由的二阶约束误差逐渐小,且垂向和横向
从 0.64 mrad 减小至 0.44 mrad;摇头角度从 0.33 mrad
运动两个自由的约束误差变化最为明显,这表明适
减小至 0.22 mrad。在一定范围内增大 β i 能够更加有
j
当增大 L 能够提升主动控制抑制车体振动加速度的
效地增强主动悬挂抑制横风环境中高速列车的位移
控制效果。但是过大的 L 会导致系统震颤。
的作用效果。
不同参数 β i 下的高速列车横向振动加速度时域 3.3 控制参数 K 的影响分析
j
计算结果如图 13 所示。由图 13 可知,适当增大 β ij 为了探究控制力 H 2 包含的常数 K 对控制效果的
能够更加有效地增强主动悬挂抑制横风环境中高速 影响,本节计算了不同参数 K 下的高速列车五个自
列车的振动作用效果。 由度的约束误差,结果如图 15 所示。由图 15 可知,
在一定范围内随着 K 的增大,车体五个自由度的二
β ij =0.1 β ij =1 β ij =10 β ij =100
0.18 阶约束误差逐渐小,且垂向和横向运动两个自由度
的约束误差变化最为明显,这表明适当增大 K 能够
横向加速度 / (m·s −2 ) 0 3.4 作动器响应灵敏度分析
0.09
有效减小约束误差,进而提升主动控制效果。
作动器的响应在工程应用中至关重要。为分析
−0.09
作动器响应时间对控制效果的影响,将作动器考虑
−0.18 为一个时间常数为 T c 的一阶系统。在风速为 22.5 m/s
17.0 17.2 17.4 17.6 17.8 18.0
时间 / s 的随机横风作用下,不同参数 T c 下的高速列车动力
图 13 不同参数 β i 下的车体横向振动加速度 学响应如图 16 所示。其中,图 16(a)表示高速列车
j
前、后转向架二系悬挂中的垂向作动器的输出时
Fig. 13 Lateral vibration accelerations of carbody under
程,图 16(b)表示高速列车前、后转向架横向作动器
different parameter β ij