
Page 9 - 《振动工程学报》2025年第11期
P. 9
第 11 期 凌 亮,等:强横风环境下高速列车运行安全自适应约束跟随控制 2467
Ӛุ M c I cx 性,而仿生结构(BIS)的有益非线性与约束跟随控制
的优异性为高速列车的主动控制提供了思路。基于
Φ c
F y
Y c
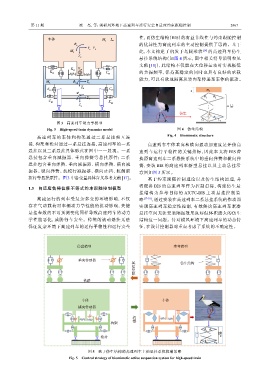
此,本文构建了启发于鸟腿形状 [18] 的高速列车仿生
M x
悬挂系统结构(如图 4 所示,图中相关符号说明参见
Z c
文献 [18]),此结构不仅能在大位移运动时实现极低
K rx
K st
K sy C sy 的共振频率,保持高稳定的同时也具有良好的承载
能力,可以有效地隔离从转向架传递至车体的振动。
M b Φ b Y b
Z b
K pz C pz
x m s
Φ w
θ 1 θ 2
Y w
C py
K py
n 层
Z w
仿生 k v
k h
L 1 L 2
图 3 高速列车动力学模型
Fig. 3 High-speed train dynamics model 图 4 仿生结构
高速列车的车体和构架通过二系悬挂相互连 Fig. 4 Biomimetic structure
接,构架和轮对通过一系悬挂连接,高速列车的一系 高速列车车体垂向和横向振动加速度是评价高
悬挂以及二系悬挂具体形式在图中一一展现。一系 速列车运行平稳性的关键指标,因此本文将 BIS 替
悬挂包含垂向减振器、垂向弹簧等悬挂原件;二系 换原高速列车二系悬挂系统中的垂向弹簧和横向弹
悬挂包含垂向弹簧、垂向减振器、横向弹簧、横向减 簧,安装 BIS 的高速列车新型悬挂以及主动悬挂示
振器、纵向弹簧、抗蛇行减振器、横向止挡、抗侧滚 意图如图 5 所示。
扭杆等悬挂原件。图 3 中各变量具体含义参考文献 [17]。 基于约束跟随控制理论以及仿生结构原理,并
将配备 BIS 的高速列车作为控制目标,构建仿生悬
1.3 自适应鲁棒位移不等式约束跟随控制模型
挂 结 构 为 参 考 目 标的 AICFC-BIS 主 动 悬 挂 控 制 策
高速运行的列车受复杂多变的环境影响,不仅 略 [17-18] ,通过安装在高速列车二系悬挂系统的作动器
存在气动载荷对车辆动力学性能的扰动影响,关键 实现高速列车稳定性控制,有效解决高速列车紧凑
悬挂参数的不可预测变化同样导致高速列车的动力 悬挂空间无法安装隔振效果良好但体积庞大的仿生
学性能恶化,威胁行车安全。传统的被动悬挂无法 结构这一问题。针对横风环境下高速列车的动态特
保证复杂环境下高速列车的运行平稳性和运行安全 征,在设计控制器时重点考虑了系统的不确定性。
仿真模型 参考模型
垂向作动器 仿生结构
伺服约束
铁路
车体 车体
横向作动器
模仿
构架
θ 1 θ 2
n层
轮对
k h
L 1 L 2
图 5 基于仿生结构的高速列车主动悬挂系统控制策略
Fig. 5 Control strategy of biomimetic active suspension system for high-speed train