
Page 118 - 《振动工程学报》2025年第9期
P. 118
2048 振 动 工 程 学 报 第 38 卷
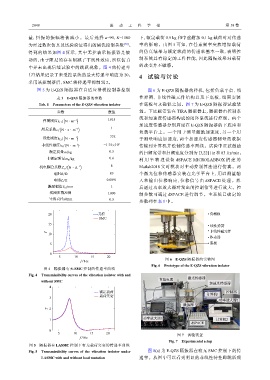
量,抖振的振幅将被减小。最后选择 a=90,K=1100 下,额定载荷 0.5 kg 和中途附加 0.1 kg 载荷时对传递
为经过数次仿真及试验验证得出的最优控制参数 [35] 。 率的影响。由图 5 可知,在任意频率突然增加载荷
得到的结果如图 4 所示,其中无控表示隔振器是被 的仿真结果与额定载荷的传递率基本一致,表明控
动的,由于阻尼的存在削减了非线性效应,所以仿真 制系统具有稳定的工作性能,因此隔振效果对载荷
中并未出现后续试验中的跳跃现象。图 4 的传递率 的改变并不敏感。
(T)结果记录了未受控系统的最大传递率响应为 20。 4 试 验 与 讨 论
采用该控制器后,SMC 将传递率抑制到 2。
图 5 为 E-QZS 隔振器在自适应滑模控制器控制 图 6 为 E-QZS 隔振器的样机,包括负载平台、线
性弹簧、非线性磁元件结构以及下底板,线圈安装
表 1 E-QZS 隔振器的参数
Tab. 1 Parameters of the E-QZS vibration isolator 在底板与永磁铁之间。图 7 为 E-QZS 隔振器试验装
参数 数值 置。下底板安装在 TIRA 激振器上,激振器由控制系
统和加速度传感器构成的闭环系统进行控制。两个
(
)
弹簧刚度 k 11 / N·m −1 1915
加速度传感器分别固定在 E-QZS 隔振器的下底座和
( ) 1
阻尼系数 c/ N·s·m −1
负载平台上。一个用于测量激励加速度,另一个用
( ) −775
线性刚度 k 12 / N·m −1 于测量响应加速度,两个加速度传感器测量的数据
(
非线性刚度 k 3 / N·m −3 ) −1.75 ×10 6 传输到计算机并绘制传递率图线。试验中正弦激励
额定质量 m/kg 0.5 的扫频宽带和扫频速度分别为 [3,22] Hz 和 83 Hz/min。
非额定质量 m 0 /kg 0.6 利 用 半 物 理 设备 dSPACE MICROLABBOX 搭 建 的
(
机电耦合系数 C e / N·A −1 ) 8 Matlab2018 实时模块对主动控制算法进行仿真。两
电阻 R/Ω 89 个激光位移传感器安装在光学平台上,用以测量输
电感 L/H 0.0091 入和输出位移响应,位移信号由 dSPACE 处理。然
激励幅值 Y 0 /mm 1 后通过功率放大器对发出的控制信号进行放大。控
线圈匝数N/圈 1000 制参数可通过 dSPACE 进行调节。主系统已确定的
导线直径d/mm 0.5
参数列在表 1 中。
20 无控 负载板
SMC
15
线性弹簧
非线性磁元件
T
10
作动器
5 底板
0
5 10 15 20 隔振器的实物图
f / Hz 图 6 E-QZS
Fig. 6 Prototype of the E-QZS vibration isolator
图 4 隔振器有无 SMC 控制的传递率曲线
Fig. 4 Transmissibility curves of the vibration isolator with and
直流电源 激光传感器
without SMC
加速度传感器
4
额定载荷 控制器
载荷突变 计算机1
3
功率放大器2
激振器
T 2
1 功率放大器1 计算机2
dSPACE
0
5 10 15 20 图 7 试验装置
f / Hz
Fig. 7 Experimental setup
图 5 隔振器在 LASMC 控制下有无载荷突变的传递率曲线
图 8(a) 为 隔振器在有无 控制下的传
Fig. 5 Transmissibility curves of the vibration isolator under E-QZS SMC
LASMC with and without load mutation 递率。从图中可以看到明显的非线性特性即跳跃现