
Page 78 - 《振动工程学报》2025年第8期
P. 78
1718 振 动 工 程 学 报 第 38 卷
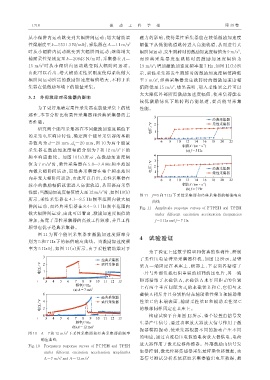
从小幅阱内运动跳变到大幅阱间运动;增大辅助柔 磁力的影响,使得柔性采集器能在较低激励加速度
性梁刚度至 k=5531.3 N/m 时,采集器在 A=11 m/s 2 幅值下从低能轨道跳转进入高能轨道,从而进行大
时从小幅阱内运动跳变到大幅阱间运动;继续增大 幅阱间运动,发生跳转时的激励加速度幅值为 9 m/s ,
2
辅助柔性梁刚度至 k=20843 N/m 时,采集器在 A= 而 经 典 采 集 器 发 生 跳 转 时 的 激 励 加 速 度 幅 值 为
2
15 m/s 时 从 小 幅 阱 内 运 动 跳 变 到 大 幅 阱 间 运 动 。 19 m/s ;增加激励加速度频率至 7 Hz,如图 11(b)所
2
由此可以看出,增大辅助柔性梁刚度使得系统做大 示,柔性采集器发生跳转时的激励加速度幅值降低
幅阱间运动所需的激励加速度幅值增大,不利于采 至 7 m/s ,经典采集器发生跳转时的激励加速度幅
2
集器在低激励环境下的能量采集。 值降低至 15 m/s ,结果表明,引入柔性梁之后可以
2
大大降低外部所需激励加速度幅值,使采集器能在
3. 2 外部激励对采集器的影响
较 低 激 励 情 况 下 跳 转 到 高 能 轨 道 ,提 高 能 量 采 集
为了更好地确定柔性采集器在能量采集上的优 性能。
越性,本节分析比较柔性采集器和经典采集器的主
要性能。
研究两个能量采集器在不同激励加速度幅值下
的采集电压响应特性,确定两个能量采集器的基础
参数均为 d=20 mm、d g =20 mm,图 10 为两个能量
采集器在激励加速度幅值分别为 7 和 12 m/s 下的
2
频率响应曲线。如图 10(a)所示,在激励加速度幅
值为 7 m/s 时,柔性采集器在 5.8~7.4 Hz 频率范围
2
内做大幅阱间运动,而经典采集器在整个频率范围
内并无大幅阱间运动,由此可以看出,柔性采集器在
较小的激励幅值就能进入高能轨道,从而提高采集
性能;当激励加速度幅值增大至 12 m/s 时,如图 10(b)
2
图 11 f=5 和 7 Hz 下柔性采集器和经典采集器的幅值响应
所示,柔性采集器在 4.1~8.5 Hz 频率范围内做大幅
曲线
阱间运动,而经典采集器在 8.4~9.1 Hz 频率范围内 Fig. 11 Amplitude response curves of FTPEH and TPEH
做大幅阱间运动,由此可以看出,激励加速度幅值的 under different excitation acceleration frequencies
增加,拓宽了柔性采集器的高效工作频带,并且工作 f=5 Hz and f=7 Hz
频带也优于经典采集器。
图 11 为两个能量采集器在激励加速度频率分
4 试验验证
别为 5 和 7 Hz 下的辐值响应曲线。当激励加速度频
率为 5 Hz 时,如图 11(a)所示,由于柔性辅助梁对于
为了验证上述数学模型和仿真的准确性,研制
了柔性压电悬臂梁采集器样机,如图 12 所示,悬臂
梁 A 一端固定在基座上,根部上、下表面各粘结了
一片与外部负载电阻串联的相同的压电片,另一端
顶部粘结了永磁铁 A,永磁铁 A 水平间距 d 的位置
上有两个垂直间距为 d g 的永磁铁 B 和 C,它们与永
磁铁 A 相斥并且分别粘结在辅助柔性梁 B 和辅助柔
性梁 C 的末端表面,辅助柔性梁 B 和辅助柔性梁 C
的根部同样固定在基座上。
构建试验平台如图 12 所示,整个装置由信号发
生器产生信号,通过功率放大器放大信号作用于激
振器模拟振动,使采集器根据不同的振动产生不同
2
图 10 A=7 和 12 m/s 下柔性采集器和经典采集器的频率
的响应,通过直流稳压电源给电荷放大器供电,电荷
响应曲线
放大器作用于激光位移传感器。外部激励由信号发
Fig. 10 Frequency response curves of FTPEH and TPEH
生器控制,激光位移传感器采集悬臂梁位移数据,动
under different excitation acceleration amplitudes
2
A=7 m/s and A=12 m/s 2 态信号测试分析系统获取采集器输出电压数据,最