
Page 75 - 《振动工程学报》2025年第8期
P. 75
第 8 期 侯露刚,等: 可调势阱型三稳态压电能量采集器的动力学特性研究 1715
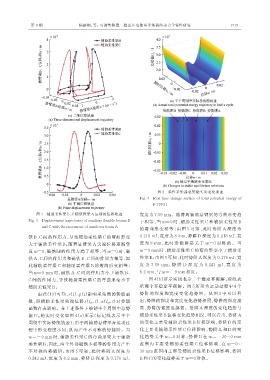
图 4 柔性采集器总势能实时变化曲面
Fig. 4 Real-time change surface of total potential energy of
FTPEH
图 3 辅助柔性梁 B、C 随悬臂梁 A 运动的位移轨迹 宽度为 7.59 mm。随着两辅助悬臂梁的弯曲形变趋
Fig. 3 Displacement trajectories of auxiliary flexible beams B 于相等,当 w=0 时,辅助柔性梁 C 和辅助柔性梁 B
and C with the movement of cantilever beam A
的弯曲形变相等 ;由图 5 可知,此时势阱 A 深度为
铁 B、C 间的作用力,导致辅助柔性梁 C 的弯曲形变 0.218 mJ、宽度为 8 mm,势阱 D 深度为 0.218 mJ、宽
大于辅助柔性梁 B;随着悬臂梁 A 尖端位移逐渐靠 度 为 8 mm,此 时 势 能 阱 是 关 于 w=0 对 称 的 。 当
近 w=0,磁铁间的作用力趋于相等,当 w=0 时,磁 w=9 mm 时,辅助柔性梁 C 的弯曲形变小于辅助柔
铁 A、C 间的作用力和磁铁 B、C 间的作用力相等,因 性梁 B;由图 5 可知,此时势阱 A 深度为 0.176 mJ、宽
此辅助柔性梁 C 和辅助柔性梁 B 的弯曲形变相等; 度 为 7.59 mm,势 阱 D 深 度 为 0.243 mJ、宽 度 为
当 w=9 mm 时,磁铁 A、C 间的作用力小于磁铁 B、 8.2 mm,与 w=−9 mm 相反。
C 间的作用力,导致辅助柔性梁 C 的弯曲形变小于 图 4(b)所示实线表示三个稳定平衡解,虚线表
辅助柔性梁 B。 示两个不稳定平衡解。图 5 所示为运动过程中 4 个
由式(19)可知,r(t)、p(t)影响采集器的势能函 势阱的深度和宽度变化趋势图。从图 5 中可以看
数,即辅助柔性梁尖端位移 s(l s2 ,t)、u(l s3 ,t)对势能 出,势阱的深度和宽度变化趋势相同,势阱的深度越
函数存在影响。在上述条件下绘制半个周期中总势 高,势阱的宽度也越宽。势阱 A 深度的变化趋势与
能 U m 的实时变化如图 4(a)所示(标记线表示半个 辅助柔性梁 B 位移变化趋势相反,可以看出,势阱 A
周期中实际势能轨迹),由于两辅助悬臂梁在运动过 的变化主要受辅助柔性梁 B 位移影响,势阱 D 的变
程中形变程度不同,从而产生不对称的势能阱。当 化主要受辅助柔性梁 C 位移影响,势阱 A 和 D 的变
w=−9 mm 时,辅助柔性梁 C 的弯曲形变大于辅助 化趋势关于 w=0 对称;势阱 B 在 w=−30~0 mm
柔性梁 B,因此,两个外部磁铁不相等的作用力产生 范 围 内 主 要 受 辅 助 柔 性 梁 C 位 移 影 响 ,在 w=0~
不对称的势能阱 ;由图 5 可知,此时势阱 A 深度为 30 mm 范围内主要受辅助柔性梁 B 位移影响,势阱
0.243 mJ、宽度为 8.2 mm,势阱 D 深度为 0.176 mJ、 B 和 C 的变化趋势关于 w=0 对称。