
Page 66 - 《振动工程学报》2025年第8期
P. 66
1706 振 动 工 程 学 报 第 38 卷
系为:
4
5
3
y = 0.1422x - 0.1522x - 3.4125x +
2
8.0191x + 8.5236x + 17.4420 (6)
式中,y 表示吸振器的固有频率;x 表示吸振器内部
每个励磁线圈所通的电流大小。
表 3 MRE 吸振器移频结果
Tab. 3 Frequency shift results of MRE absorber
电流/A 频率/Hz 电流/A 频率/Hz
0 17.35 1.6 38.16
0.2 19.56 1.8 40.02 图 16 激振器试验平台
0.4 22.14 2.0 41.14 Fig. 16 Experimental platform of vibration exciter
0.6 24.37 2.2 42.25
作带宽内选择 20、25 和 40 Hz 三个频率值,令吸振器
0.8 27.73 2.4 43.37
固有频率分别为 y =20,25,40 Hz,并代入式(6)计
1.0 30.33 2.6 43.75
算 得 出 对 应 的 吸 振 器 输 入 电 流 为 0.25、0.62 和
1.2 33.31 2.8 44.49
1.4 36.29 3.0 45.21 1.81 A。激振器试验一共分三组进行,每组试验过
程中保证激振器输出力的大小和频率不变。振子和
主 轴 上 的 加 速 度 信 号 测 量 结 果 如 图 17~19 所 示 。
可以看出,吸振器振子和机器人主轴的加速度变化
趋势在三种不同激励频率下基本相同。根据式(6)
计算结果向吸振器通入与外界振动频率相对应的电
流后,振子和主轴的振动加速度信号幅值同时变化,
振子处加速度明显增加,机器人主轴处显著降低,主
轴上的振动被振子有效吸收,符合吸振器的工作原
理。由此可以确定拟合出的吸振器固有频率‑电流
对应公式准确。
图 15 吸振器固有频率‑电流关系曲线
Fig. 15 Relation curve of absorber natural frequency‑current
4 试验验证
4. 1 激振器试验
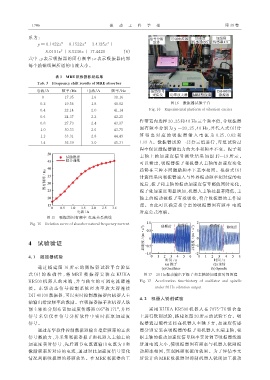
通 过 搭 建 图 16 所 示 的 激 振 器 试 验 平 台 验 证
式(6)的 准 确 性 ,将 MRE 吸 振 器 安 装 在 KUKA 图 17 20 Hz 振动输出下振子和主轴的加速度时间历程
KR500 机 器 人 的 末 端 ,并 与 独 立 的 可 调 电 流 源 连 Fig. 17 Acceleration time-history of oscillator and spindle
接 。 东 华 动 态 信 号 控 制 系 统 经 功 率 放 大 器 连 接 under 20 Hz vibration output
DH 40100 激振器,可以实时控制激振器向机器人主
4. 2 机器人铣削试验
轴输出指定频率的激励。在吸振器振子和机器人铣
削主轴处分别布置加速度传感器 095 和 171 ,并经 采 用 KUKA KR500 机 器 人 在 7075‑T6 铝 合 金
#
#
信 号 采 集 仪 在 信 号 分 析 软 件 中 实 时 获 取 加 速 度 上进行铣削试验,搭建如图 20 所示的试验平台。吸
信号。 振器通过螺栓连接在机器人主轴下方,加速度传感
通过东华软件控制激振器输出指定频率的正弦 器分别安装在吸振器的振子和机器人末端主轴,根
信号激励力,并采集吸振器振子和机器人主轴上的 据主轴的振动加速度信号频率实时调节吸振器线圈
加速度实时信号,先后调节电流源输出电流为 0 和 所通电流大小,使吸振器固有频率与机器人铣削振
激励频率所对应的电流,通过对比加速度信号变化 动频率相同,实现同频吸振的效果。为了评估本文
情况判断吸振器的移频效果。在 MRE 吸振器的工 所设计的 MRE 吸振器对抑制机器人铣削加工振动