
Page 63 - 《振动工程学报》2025年第8期
P. 63
第 8 期 刘 鹏,等: 一种机器人铣削颤振抑制用磁流变弹性体吸振器的设计与试验研究 1703
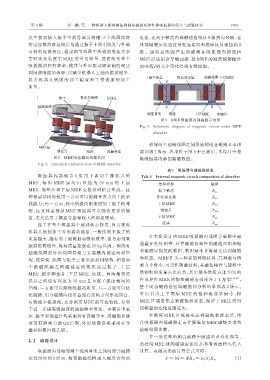
发生装置插入振子中的骨架安装槽,6 个线圈绕好 电流,在两个铁芯内部磁感应线从 S 极指向 N 极,在
指定匝数的漆包线后均通过振子上的引线孔与外部 外部磁感应线通过骨架连接梁和底座从 N 极指向 S
可调电流源相连,通过调节线圈中所通的电流大小 极 。 通 电 后 线 圈 产 生 的 磁 场 在 吸 振 器 内 部 经 由
实时改变装置中 MRE 的剪切模量,进而改变整个 MRE 形成闭合导磁回路,使 MRE 的刚度能够随外
吸振器的固有频率,使其与外界振动频率相匹配达 加电流 I 的大小变化得到有效控制。
到同频吸振的效果,以减少机器人主轴的振动能量,
提 升 机 器 人 铣 削 的 加 工 精 度 和 工 件 表 面 的 加 工
质量。
图 9 MRE 吸振器内部磁路示意图
Fig. 9 Schematic diagram of magnetic circuit inside MRE
absorber
相邻两个励磁线圈之间形成的闭合磁路基本组
成如表 1 所示,各部件于图 9 中已标出,本设计中忽
图 8 MRE 吸振器结构爆炸图 略吸振器内部的漏磁效应。
Fig. 8 Structural exploded view of MRE absorber
表 1 吸振器内部磁路组成
吸 振 器 内 部 包 含 6 组 用 于 剪 切 工 作 模 式 的 Tab. 1 Internal magnetic circuit composition of absorber
MRE,每 组 MRE 层 均 由 直 径 为 30 mm 的 上 层 结构部件 磁阻
MRE、钢垫片和下层 MRE 交替排列粘合形成。这 振子铁芯 R m1
种叠层结构的使用一方面可以提高垂直方向上的承 骨架连接梁 R m2
载能力;另一方面,较小的横向刚度增加了振子的冲 上层 MRE R m3
程,这意味着叠层 MRE 吸振器可以吸收更多的能 钢垫片 R m4
量,尤其适用于颤振等振幅较大的抑振领域。 下层 MRE R m5
振子在整个吸振器中起到核心作用,负责吸收 底座 R m6
机器人铣削加工时的振动能量,一般情况下振子的
在本次设计的 MRE 吸振器内部闭合磁路中磁
质量越大,越有利于提高振动吸收效率,但考虑到吸
通量 Φ 处处相等,计算磁路各部件的磁通面积和饱
振器的简便性,将其质量控制在 20 kg 以内。缠绕有
励磁线圈的环形线圈骨架与安装槽内部空间相匹 和磁感应强度的乘积,乘积最小者将最先达到磁饱
配,使骨架、线圈与振子三者形成封闭结构,相邻两 和状态。MRE 作为一种新型智能材料,其剩磁与矫
个 励 磁 线 圈 之 间 磁 感 应 线 依 次 通 过 振 子 、上 层 顽力非常小,可当作软磁材料;其磁化特性与原料中
MRE、圆形钢垫片、下层 MRE、底座。两两相邻的 铁颗粒的质量占比有关,其中羰基铁粉占比 70% 的
铁芯之间设有深度为 30 mm 且与振子弧度相同的 各向异性 MRE 的饱和磁感应强度在 1 T 左右 [39‑40] 。
凹槽,一方面可以降低吸振器质量,另一方面可以优 整个闭合磁路各区域磁饱和分析结果如表 2 所示。
化磁路,引导磁感应线沿着现有结构方向形成闭合, 可 以 看 出 上 下 两 层 MRE 的 饱 和 磁 通 量 最 小 ,即
有效减少磁损耗,充分利用 MRE 的可控特性,有利 MRE 区域最先达到磁饱和状态,保证了 MRE 的剪
于进一步提高吸振器的减振频率带宽。本装置中底 切模量的变化范围最大。
座、振子和钢垫片均采用具有高磁导率、高磁饱和强 在确保 MRE 区域最先达到磁饱和状态后,结
度及低矫顽力的 Q235 钢,环形线圈骨架采用不导 合吸振器内部磁路走向计算满足 MRE 磁场要求的
磁材料聚四氟乙烯。 励磁线圈参数。
在一条完整的闭合磁路中磁通量 Φ 处处相等,
2. 2 磁路设计
此处用 MRE 处的磁感应强度 B 3 和有效面积 S 3 代入
吸振器内部相邻两个线圈骨架之间的闭合磁路 计算。由磁动势的计算公式可得:
示意图如图 9 所示,相邻励磁线圈通入相反方向的 F = NI = ΦR m = B 3 S 3 R m (1)