
Page 63 - 《武汉大学学报(信息科学版)》2025年第10期
P. 63
1998 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 10 月
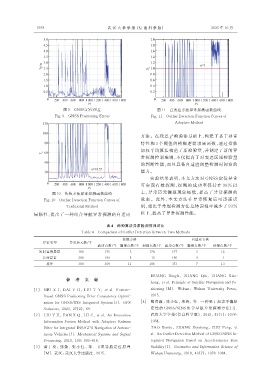
图 9 GNSS 定位误差 图 11 自适应方法异常探测函数曲线
Fig. 9 GNSS Positioning Errors Fig. 11 Outlier Detection Function Curves of
Adaptive Method
方法。在残差 χ 检验法基础上,构建了基于异常
2
特性和 3 个阈值的模糊逻辑隶属函数,通过指数
加权平均算法构造了新检验量,并制定了新的异
常探测控制准则,不仅提高了对交迭区域检验量
的判断性能,而且具备自适应调整检测时间窗的
能力。
实验结果表明,本文方法对 GNSS 定位异常
可 实 现 有 效 探 测 ,探 测 的 成 功 率 保 持 在 98% 以
图 10 传统方法异常探测函数曲线 上,异常历元漏报现象极低,提高了异常探测的
Fig. 10 Outlier Detection Function Curves of 效 率 。 此 外 ,本 文 方 法 在 异 常 恢 复 后 可 迅 速 识
Traditional Method 别,相比于常规检测方法总体误报率减少了 93%
局限性,提出了一种组合导航异常探测的自适应 以上,提高了异常探测性能。
表 4 两种算法异常检测情况对比
Table 4 Comparison of Outlier Detection Between Two Methods
传统方法 自适应方法
异常类型 异常历元数/个
成功点数/个 漏报点数/个 误报点数/个 成功点数/个 漏报点数/个 误报点数/个
短时连续异常 180 175 5 174 177 3 12
长时异常 200 194 6 12 196 4 1
总计 380 369 11 186 373 7 13
HUANG Dingfa, ZHANG Qin, ZHANG Xiao‑
参 考 文 献
hong, et al. Principle of Satellite Navigation and Po‑
[1] NIU X J, DAI Y H, LIU T Y, et al. Feature- sitioning[M]. Wuhan: Wuhan University Press,
Based GNSS Positioning Error Consistency Optimi‑ 2015.
zation for GNSS/INS Integrated System[J]. GPS [4] 陶贤露, 张小红, 朱锋, 等 . 一种基于加表零偏稳
Solutions, 2023, 27(2): 89. 定 性 的 GNSS/SINS 组 合 导 航 异 常 探 测 方 法[J].
[2] LIU Y H, FAN X Q, LÜ C, et al. An Innovative 武汉大学学报(信息科学版), 2018, 43(7): 1078-
Information Fusion Method with Adaptive Kalman 1084.
Filter for Integrated INS/GPS Navigation of Autono‑ TAO Xianlu, ZHANG Xiaohong, ZHU Feng, et
mous Vehicles[J]. Mechanical Systems and Signal al. An Outlier Detection Method of GNSS/SINS In‑
Processing, 2018, 100: 605-616. tegrated Navigation Based on Accelerometer Bias
[3] 黄 丁 发 , 张 勤 , 张 小 红 , 等 . 卫 星 导 航 定 位 原 理 Stability[J]. Geomatics and Information Science of
[M]. 武汉: 武汉大学出版社, 2015. Wuhan University, 2018, 43(7): 1078-1084.