
Page 61 - 《武汉大学学报(信息科学版)》2025年第10期
P. 61
1996 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 10 月
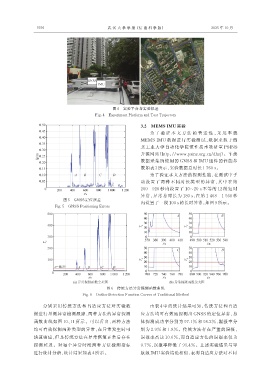
图 4 实验平台与实验轨迹
Fig. 4 Experiment Platform and Test Trajectory
3.2 MEMS IMU 实验
为 了 验 证 本 文 方 法 的 普 适 性 ,采 用 车 载
MEMS IMU 数据进行实验测试,数据来源于西
北工业大学自动化学院惯性技术教研室 PSINS
开源网站(http://www.psins.org.cn/dhsj)。车载
数据采集所使用的 GNSS 和 IMU 组件的性能参
数如表 3 所示,实验数据总时长 1 760 s。
为了验证本文方法的探测性能,在测试中手
动 设 置 了 两 种 不 同 时 长 类 型 的 异 常 ,其 中 在 第
200—920 秒内设置了 10~20 s 不等的 12 段短时
异常,异常总时长为 180 s,在第 1 468—1 568 秒
图 5 GNSS 定位误差
内设置了一段 100 s 的长时异常,如图 9 所示。
Fig. 5 GNSS Positioning Errors
图 6 传统方法异常探测函数曲线
Fig. 6 Outlier Detection Function Curves of Traditional Method
分别采用传统方法和自适应方法对实验数 由表 4 中的统计结果可知,传统方法和自适
据进行量测异常检测跟踪,两种方法的异常探测 应方法均可有效地探测出 GNSS 的定位异常,总
函数曲线如图 10、11 所示。可以看出,两种方法 体探测成功率分别为 97.1% 和 98.2%,漏报率分
均可有效探测两种类型的异常,在异常发生时可 别为 2.9% 和 1.8%。传统方法存在严重的误报,
快速响应,但是传统方法在异常恢复正常后存在 误报率高达 10.6%,而自适应方法的误报率仅为
探测延迟。对每个异常时段两种方法检测指标 0.7%,误报率降低了 93.4%。上述实验结果与导
进行统计分析,统计结果如表 4 所示。 航级 IMU 实验结论相似,表明自适应方法对不同