
Page 60 - 《武汉大学学报(信息科学版)》2025年第10期
P. 60
第 50 卷第 10 期 王成龙等:复杂环境 GNSS/INS 组合定位异常探测自适应方法 1995
表 1 导航级车载传感器参数
Table 1 Navigation Level Vehicle Sensor Parameters
参数项 参数值
-1
陀螺仪零偏/(°·h ) 0.01
-1 -1/2
陀螺仪随机游走/(°·h ·Hz ) 0.001 5
加速度计零偏/μg 50
-1/2
加速度计随机游走/(μg·Hz ) 10
GNSS 定位误差/m 0.04
定位误差分别为 0.1 m 和 0.35 m。此外。为了验
证对不同大小异常情况的检测性能,手动设置了
两 个 卫 星 信 号 异 常 区 域 ,分 别 在 第 500—521 秒
(图 4 中 B 区域)和第 716—748 秒(图 4 中 C 区域)
时间段内给 GNSS 加入 0.2 m 和 0.3 m 的定位误
差。实验过程中,GNSS 定位误差如图 5 所示。
分别采用本文自适应方法和传统移动窗口
平滑方法对异常进行检测跟踪,移动窗口平滑方
法中窗口长度设置为 4,图 6、图 7 是两种方法异
常探测函数曲线及其放大图。
由图 6 可知,传统方法对 A 区域的异常响应
速度较慢,开始时在阈值附近跳动,无法准确探
测出异常,经过 3 s 后才对异常响应。随着异常值
的增大,响应速度也变快,对 B、C、D 区域的异常
在发生的当前时刻可迅速做出响应,且后续的所
有异常均可被探测出。传统算法在异常恢复正
常后存在探测延迟现象,分别需要 7 s、15 s、20 s
和 22 s 才提示异常结束,发生了严重的误报。由
图 7 可知,自适应方法对每个区域的异常均可快
速响应,在异常发生的当前时刻及时提供告警信
息,且在异常恢复正常时刻快速解除预警,只需 2
s、2 s、0 s 和 0 s 即可提示异常结束。
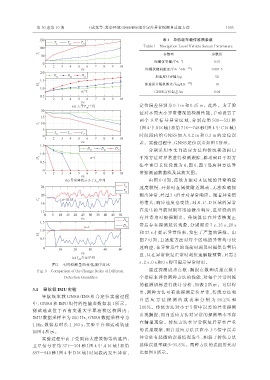
图 3 不同检测量的变化规律对比
通过探测成功点数、漏报点数和误报点数 3
Fig. 3 Comparison of the Change Rules of Different
Detection Quantities 个指标来评价两种方法的性能,对每个异常时段
的检测指标进行统计分析,如表 2 所示。可以得
3.1 导航级 IMU 实验
出,两种方法可有效探测定位异常,传统方法和
导航级车载 GNSS/INS 组合定位实验过程
自 适 应 方 法 探 测 的 成 功 率 分 别 为 98.2% 和
中,GNSS 和 IMU 组件的性能参数如表 1 所示。
100%。传统方法对小于 5 倍中误差的异常探测
测 试 地 点 位 于 西 南 交 通 大 学 犀 浦 校 区 校 园 内 ,
出现漏报,而自适应方法对异常的探测基本不存
IMU 数据采样率为 200 Hz,GNSS 数据采样率为
在漏报现象。传统方法在异常恢复后存在严重
1 Hz,数据总时长 1 160 s,实验平台和运动轨迹
的误报现象,而自适应方法只在小于 5 倍中误差
如图 4 所示。
实验过程中由于受到高大建筑物等的遮挡, 异常处有轻微的误报情况发生,相较于传统方法
卫星信号在第 371—391 秒(图 4 中 A 区域)和第 总体误报率减少 93.8%。两种方法的误报历元对
897—940 秒(图 4 中 D 区域)时间段内发生异常, 比如图 8 所示。