
Page 39 - 《武汉大学学报(信息科学版)》2025年第6期
P. 39
第 50 卷第 6 期 祝会忠等:灾害环境下低成本终端 BDS 高精度应急定位方法 1061
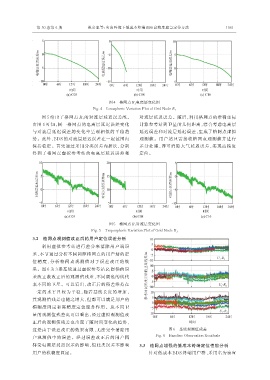
图 4 格网点 R 1 电离层变化图
Fig. 4 Ionospheric Variation Plot of Grid Node R 1
图 5 给出了格网点 R 1 的对流层延迟误差图。 对流层延迟误差。随后,利用格网点的准确坐标
由图 5 可知,同一格网点的电离层延迟误差变化 计算参考站到卫星的几何距离,综合考虑电离层
与对流层延迟误差的变化率呈现相似的平稳趋 延迟误差和对流层延迟误差,生成了格网点虚拟
势。此外,BDS 的对流层延迟误差在一定范围内 观测值。用户站只需接收格网点观测值并进行
保持稳定。首先通过采用分类误差内插法,分别 差分处理,即可消除大气延迟误差,实现高精度
得到了格网点虚拟参考站的电离层延迟误差和 定位。
图 5 格网点 R 1 对流层变化图
Fig. 5 Tropospheric Variation Plot of Grid Node R 1
3.2 格网点观测值改正后的用户定位误差分析
利用虚拟参考站进行差分来消除用户端误
差,本节通过分析不同间距格网点的用户站的定
位 精 度 ,分 析 格 网 点 观 测 值 对 于 误 差 改 正 的 效
果。图 6 为 3 条基线通过虚拟参考站 R 1 提供的误
差改正数改正后的观测值残差,不同颜色的线代
表不同的卫星。可以看出,改正后的残差维持在
一定的水平且较为平稳,随着基线长度的增加,
其观测值残差也随之增大,但都可以满足用户的
模糊度固定和高精度定位服务作用。从不同卫
星的观测值残差也可以看出,经过虚拟观测值改
正后的观测值残差也出现了随时间变化的趋势,
这是由于误差改正的效果有限,无法完全消除用 图 6 基线观测值残差
户观测值中的误差。经过误差改正后的用户同 Fig. 6 Baseline Observation Residuals
样受电离层延迟误差的影响,但此类误差不影响 3.3 格网点增强的低成本终端定位性能分析
用户的模糊度固定。 针对低成本 BDS 终端用户群,采用名为泰宣