
Page 132 - 《武汉大学学报(信息科学版)》2025年第6期
P. 132
1154 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 6 月
图 5 无人车及自主工作
Fig. 5 Unmanned Vehicles and Autonomous Operation
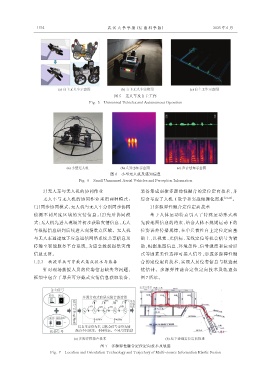
图 6 小型无人机及感知信息
Fig. 6 Small Unmanned Aerial Vehicles and Perception Information
3)无人车与无人机的协同作业 装备集成弱捷多源弹性融合的定位定向技术,并
无人车与无人机的协同作业采用两种模式: 综合考虑了人机工效学和实战便携化需求 [21-23] 。
(1)同步协同模式:无人机与无人车分别同步协同 1)多源弹性融合定位定向技术
侦测不同尺度区域的灾情信息。(2)先后协同模 基于人体运动特点引入了特殊运动形式和
式:无人机先进入现场并初步获取灾情信息,无人 先验地图信息的约束,结合人体不规则运动下的
车根据信息研判后续进入现场重点区域。无人机 位姿误差传播规律,在单兵惯性自主定位定向基
与无人车通过地下应急通信网络系统共享信息及 础上,以视觉、光信标、无线定位等机会信号为辅
传输至智能服务平台系统,为应急救援提供灾情 助,根据地图信息、环境条件、信号强度和运动形
信息支撑。 式等因素柔性选择可接入信号,形成多源弹性融
1.2.3 救援单兵可穿戴式集成技术与装备 合的定位定向技术,实现人员位姿信息与轨迹最
针对现场救援人员的位姿信息缺失等问题, 优估计。多源弹性融合定位定向技术及轨迹如
框架中包含了单兵可穿戴式灾情信息获取装备, 图 7 所示。
图 7 多源弹性融合定位定向技术及轨迹
Fig. 7 Location and Orientation Technology and Trajectory of Multi-source Information Elastic Fusion