
Page 130 - 《武汉大学学报(信息科学版)》2025年第6期
P. 130
1152 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 6 月
累计建筑面积超 32.76 亿 m 2[11] ,地下空间具有以 复杂大型公共地下空间规模大(如交通枢纽、商
下 特 点 :(1)功 能 复 杂 多 样 :地 下 空 间 功 能 从 单 业中心等),地下有限作业空间规模小(如地下变
一向综合化、多元化转变,涵盖了地下轨道交通、 电 站 、地 下 泵 房 等) ;(4)环 境 封 闭 风 险 高 :地
[14]
综合管廊、地下商业、地下娱乐等 [12-14] ;(2)结构 下空间多位于建筑物、基础设施、山体下,易造成
错综不规则:不同地下空间内结构各异,内部各 洪涝、火灾、毒害气体泄漏等灾害事故 [15] 。城市
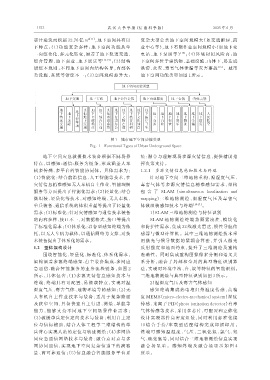
类设施、系统等错综不一;(3)空间规模差异大: 地下空间功能类型如图 1 所示。
图 1 城市地下空间功能类型
Fig. 1 Functional Types of Urban Underground Space
地下空间应急救援技术装备根据不同场景 统:融合与理解现场多源灾情信息,提供辅助指
特点,以感知-通信-服务为链条,形成涵盖人车 挥决策支持。
机多传感、多平台的智能协同体。具体需求为: 1.2.1 多源灾情信息感知技术与终端
(1)智能化:结合前沿信息、人工智能等技术,在 针对地下空间三维地物重构、温湿度气压、
灾情信息精准感知无人车机自主作业、智能理解 毒 害 气 体 等 多 源 灾 情 信 息 精 准 感 知 需 求 ,架 构
服务等方面提出了智能化需求;(2)轻量化:结合 包 含 了 SLAM (simultaneous localization and
微组装、轻质化等技术,对感知终端、无人车机、 mapping)三 维 地 物 测 绘 、温 湿 度 气 压 及 毒 害 气
单兵装备、通信系统的体积重量等提出了轻量化 体微组装感知技术与终端 [16-17] 。
需求;(3)标准化:针对灾情感知与通信技术装备 1)SLAM 三维地物测绘与特征识别
的内容多样、接口不一,对数据格式、接口等提出 SLAM 地 物 测 绘 终 端 兼 顾 紧 凑 性 、模 块 化
了标准化需求;(4)体系化:以各型感知终端为依 和防护性需求,集成 32 线激光雷达、惯性导航传
托,以无人车机为载体,以通信网络为支撑,对技 感器与微型计算机。其中三维地物测绘技术采
术装备提出了体系化的需求。 用 激 光 与 惯 导 数 据 的 紧 耦 合 算 法 ,并 引 入 激 光
1.2 整体架构设计 反 射 强 度 和 地 面 约 束 ,提 升 了 三 维 测 绘 及 重 构
围绕智能化、轻量化、标准化、体系化需求, 准确性。同时集成重构图像像素分割和语义关
架构涵盖多源终端感知-自主装备集成-多网应 系 分 析 ,融 合 了 局 部 和 全 局 的 典 型 特 征 识 别 算
急 通 信 -融 合 智 能 服 务 的 业 务 流 程 链 条 ,如 图 2 法,实现对环境中沟、台、坡等特征的智能识别。
所 示 ,具 体 包 含 :(1)多 源 灾 情 信 息 感 知 技 术 与 三维地物测绘与典型特征识别如图 3 所示。
终 端 :终 端 具 有 可 配 置 、易 搭 载 特 点 ,实 现 对 温 2)温湿度气压及毒害气体感知
湿度气压、毒害气体、地物环境等的感知;(2)无 感 知 终 端 集 成 热 电 堆 红 外 温 度 传 感 、高 精
人 车 机 自 主 作 业 技 术 与 装 备 :适 用 于 复 杂 路 面 度 MEMS(micro-electro-mechanical system)湿度
及 狭 窄 空 间 ,具 备 快 速 自 主 行 进 、测 绘 、导 航 等 传感、光离子 PID(photo ionization detector)有毒
能 力 ,能 够 支 持 不 同 地 下 空 间 场 景 作 业 需 求 ; 气体传感等技术,采用多芯片、可配置和立体化
(3)救援单兵定位定向技术与装备:利用自主定 设 计 实 现 器 件 高 密 度 组 装 ,同 时 利 用 标 准 化 接
位 与 信 标 辅 助 ,结 合 人 体 工 程 学 三 维 结 构 的 单 口 结 合 手 持/车 载 型 适 配 结 构 完 成 即 插 即 用 。
兵背心实现人员的定位与轨迹测绘;(4)多网协 终 端 可 感 知 温 湿 度 、气 压 、二 氧 化 氮 、氯 气 、氨
同 应 急 通 信 网 络 技 术 与 装 备 :融 合 点 对 点 与 多 气、硫化氢等,同时结合三维地物测绘信息实现
网 协 同 通 信 ,实 现 地 下 空 间 复 杂 信 道 下 的 高 容 融 合 场 显 示 。 感 知 终 端 及 融 合 场 显 示 如 图 4
量 、高 可 靠 通 信 ;(5)信 息 融 合 智 能 服 务 平 台 系 所示。