
Page 50 - 《软件学报》2025年第12期
P. 50
张杨杨 等: 典型驾驶场景下接管绩效预测及特征分析 5431
在探讨不同特征如何影响接管绩效这一实验目标时, 使用 SHAP 模型显得尤为合适. 通过 SHAP 分析, 我们不
仅能够识别出哪些特征对于提高接管反应速度和接管质量最为关键, 还能深入理解这些特征之间复杂的相互作用
机制, 为优化自动驾驶系统的交接控制策略提供科学依据和实践指导.
4 实验结果分析
4.1 特征选择
除生理信号外, 车辆当前的行驶速度和方向、驾驶场景的复杂度以及驾驶员个人特征也会对驾驶员的接管绩
效产生影响, 因此, 本实验选取车辆数据、场景数据、肌电数据、眼动数据、心电数据和驾驶员信息作为模型的
输入特征. 本实验所采集的多模态数据进行数据预处理后, 分别截取 1–15 s 时间窗口内的数据形成不同的数据集,
每个数据集为 432 个接管片段. 然后将数据集按照 8:2 的比例分成训练数据和测试数据, 使用十折交叉验证对训
练数据进行训练和验证, 构建接管绩效预测模型, 最后将测试数据作为测试集对模型有效性进行验证. 模型训练的
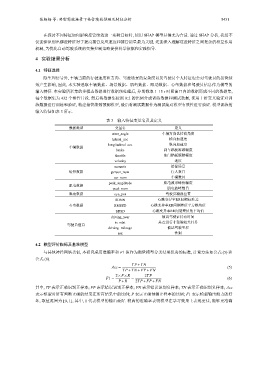
输入特征如表 3 所示.
表 3 输入特征变量名及其定义
数据类型 变量名 定义
steer_angle 车辆方向盘转向角度
lateral_acc 横向加速度
longitudinal_acc 纵向加速度
车辆数据
brake 刹车踏板踩踏幅度
throttle 油门踏板踩踏幅度
velocity 速度
scenario 接管场景
场景数据 person_num 行人数目
car_num 车辆数目
peak_amplitude 肌电波形峰值幅度
肌电数据
peak_num 肌电波峰数目
眼动数据 eye_pos 驾驶员凝视位置
SDNN 心跳变异率RR间期标准差
心电数据 RMSSD 心跳变异率RR间期差值平方根均值
SDSD 心跳变异率RR间期差值的平均值
driving_year 被试驾驶证持有时间
is_ndrt 是否进行非驾驶相关任务
驾驶员信息
driving_mileage 被试驾驶里程
sex 性别
4.2 模型评价指标及基准模型
与其他神经网络类似, 本研究采用准确率和 F1 值作为衡量模型分类结果优劣的标准, 计算方法如公式 (5) 和
公式 (6).
TP+TN
Acc = (5)
TP+TN + FP+ FN
2× P×R 2TP
F1 = = (6)
P+R 2TP+ FP+ FN
其中, TP 表示正确识别正样本; FP 表示错误识别正样本; FN 表示错误识别负样本; TN 表示正确识别负样本; Acc
表示模型对所有判断正确的结果在所有结果中的比例; P 表示正确预测正样本的比例; F1 表示模型输出能力的好
坏, 取值范围为 [0, 1], 其中, 1 代表模型的输出最好. 较高的准确率表明模型在学习效果上表现更佳, 能够更准确