
Page 48 - 《软件学报》2025年第12期
P. 48
张杨杨 等: 典型驾驶场景下接管绩效预测及特征分析 5429
量了驾驶员的即时反应能力 [41] . 接管驾驶质量直接体现了驾驶员驾控能力的高低, 高质量的接管质量体现为平滑、
精确的车辆操控, 确保行程安全无虞 [42] . 重要的是, 接管响应时间的快慢并不直接等同于接管质量的好坏; 简言之,
迅速的反应时间不一定保证后续驾驶表现优良.
事实上, 过长的接管响应期可能蕴藏风险, 尤其在紧急情境下, 延长的反应时间可能导致驾驶员缺乏应对突发
险情的宝贵时机, 从而加剧碰撞事故的风险 [43] . 因此, 在评判接管绩效时, 必须超越单一的响应时间指标, 兼顾响
应速度与操作质量, 进行综合性评估. 实践中, 理想的接管情况是驾驶员既能迅速响应接管提示, 又能在接管后展
现出卓越的驾驶技艺, 确保全程安全可控. 这不仅要求驾驶员拥有敏捷的反应力, 还必须具备精湛的驾驶技术和对
车辆深入的了解及熟练度, 共同构成了确保自动驾驶与人工驾驶安全过渡的关键能力.
在之前关于自动驾驶接管的研究中, 文献 [22−25,28] 采用接管反应时间作为判定依据对驾驶员的接管表现进
行评定, 而文献 [44,45] 则是将驾驶员接管后汽车的最大横、纵向加速度作为评价标准对驾驶员的接管质量进行
判定. 在文献 [10,22] 中, 研究者将驾驶员在接管过程中的最小碰撞时间作为接管质量好坏的评价标准. 这些研究
都涉及了接管绩效的接管反应时间或接管绩效部分, 但并未将接管反应时间与接管质量综合考虑起来对驾驶员的
接管绩效做出较为全面的判定. 在当前关于接管绩效判定的基础上, 参考国际标准 ISO/TR 21959 [44] , 该标准规范
了自动驾驶接管绩效的定义, 包括接管反应时间的定义、接管质量等; 其中接管质量包括主观衡量标准和客观衡
量标准, 而客观衡量标准主要参考驾驶员控制性能进行定义, 涵盖横向和纵向加速度值, 以及碰撞临界值, 如最小
碰撞时间 (TTC) 等. 因此, 综合采集的实验数据, 本实验选取接管反应时间 t r 、最大横向加速度 、最大纵向加速
a l
t c 综合考虑作为评价指标对接管绩效进行判定, 通过计算每项指标的累计频率的方法确定
度 a v 和最小碰撞时间
绩效等级, 在对数据进行归一化之后, 统计得到不同指标对应的累积频率, 以累积频率为 30% 和 70% 时的指标值
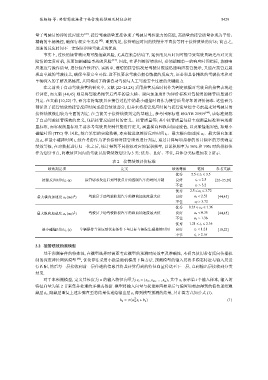
作为划分节点, 将数值区间内的驾驶员接管绩效划分为 3 类: 优秀、良好、不佳, 具体分类标准如表 2 所示.
表 2 接管绩效评价标准
绩效判定项 定义 绩效等级 范围 参考文献
优秀 2.5 ⩽ t r ⩽ 3.5
接管反应时间 t r (s) 接管请求发出后到驾驶员开始控制汽车的时间开销 良好 t r < 2.5 [22−25,28]
不佳 t r > 3.2
优秀 2.5 ⩽ a l ⩽ 3.72
2
最大横向加速度 a l (m/s ) 驾驶员手动驾驶阶段汽车的横向加速度最大值 良好 a l < 2.53 [44,45]
不佳 a l > 3.72
优秀 0.35 ⩽ a v ⩽ 1.36
2
最大纵向加速度 a v (m/s ) 驾驶员手动驾驶阶段汽车的纵向加速度最大值 良好 a v < 0.35 [44,45]
不佳 a v > 1.36
优秀 1.21 ⩽ t c ⩽ 2.16
最小碰撞时间 t c (s) 车辆保持当前运动状态条件下与目标车辆发生碰撞的时间 良好 t c < 1.21 [10,22]
不佳 t c > 2.16
3.2 接管绩效预测模型
基于预测事件的特殊性, 在模型选择时需要考虑模型的预测时间效率及准确性, 本研究使用带有反向传播机
制的深度神经网络模型 [46] , 优化算法采用小批量随机梯度下降方法. 预测模型的输入层将多模态特征与输入层进
行匹配, 然后每一层接收到前一层传递的信息并将其计算得到的特征向量传送至下一层, 直到输出层接收到分类
结果.
对于本预测模型, 定义其长度为 n 的输入特征向量为 x i = (x i1 , x i2 ,..., x in ), 其中 x i 表示第 个输入样本, 输入的
i
特征向量为第 2 节采集并处理的多模态数据. 模型将输入向量与权重矩阵相乘后与偏置项相加得到的值传递给隐
藏层 h i , 隐藏层重复上述步骤直至将结果传递给输出层 o i 得到模型预测的结果, 其计算方式如公式 (1).
T
h it = σ(w x i +b it ) (1)
it