
Page 47 - 《软件学报》2025年第12期
P. 47
5428 软件学报 2025 年第 36 卷第 12 期
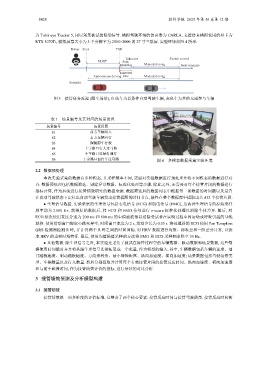
为 Tobii eye Tracker 5, 用以采集被试的眼动信号. 模拟驾驶环境的仿真器为 CARLA, 支撑仿真模拟使用的显卡为
RTX 3070Ti, 模拟屏幕大小为 3 个分辨率为 2560×2000 的 27 寸三联屏. 实验环境如图 4 所示.
Driver Start TOR
Takeover Switch control
NDRT State
transition Manual driving Next scenario
Takeover
Autonomous driving time Manual driving
Scenario
图 3 接管任务流程 (跟车场景), 红色车为有条件自动驾驶车辆, 灰色车为其他交通参与车辆
表 1 场景编号及其对应的场景设置
场景编号 场景设置
S1 前方车辆切入
S2 右方车辆直行
S3 跟随前车行驶
S4 十字路口行人过马路
S5 十字路口红绿灯通行
S6 十字路口自行车过马路 图 4 多模态数据采集实验环境
2.2 数据预处理
本次实验采集的数据有多种模态, 且采样频率不同, 需要对实验数据进行预处理并将不同模态的数据进行对
齐. 数据预处理包括数据筛选、剔除异常数据、标准化处理等步骤. 除此之外, 还需要对每个接管片段的数据进行
指标计算, 作为后续进行接管绩效研究的数据来源. 数据筛选后的数据列表中根据每一条数据的时间戳以及是否
在自动驾驶状态下定位出自动驾驶车辆发出接管提醒的时间节点, 最终在整个数据库中提取出共 432 个接管片段.
● 生理信号数据. 实验采集的生理信号包括心电信号 (ECG) 和肌电信号 (EMG), 这两种生理信号的原始采样
频率均为 2 500 Hz. 获得原始数据后, 将 ECG 和 EMG 信号进行 z-score 标准化处理以消除个体差异. 随后, 对
ECG 依次使用宽度分别为 200 ms 和 600 ms 的中值滤波器以消除受试者在实验过程中因运动或呼吸引起的基线
漂移. 使用滑动窗口提取心跳变异率, 时间窗口宽度为 2 s, 滑动步长为 0.03 s. 将处理好的 ECG 使用 Pan Tompkins
QRS 检测器检测 R 峰, 并计算两个 R 峰之间的时间间隔. 对 HRV 数据进行均值、标准差和一阶差分计算, 以获
取 HRV 的重要时域特征. 最后, 使用均值插值采样的方法将 EMG 和 ECG 采样频率降至 33 Hz.
● 其他数据. 除生理信号之外, 本实验还采集了被试在接管过程中的车辆数据、眼动数据和场景数据, 这些数
据使用时间戳对齐并将其跟生理信号连接拓展成一个张量, 作为模型的输入. 其中, 车辆数据包括车辆的速度、油
门踏板幅度、制动踏板幅度、方向盘转角、最小碰撞距离、纵向加速度、横向加速度; 场景数据包括驾驶场景类
型、车辆数量以及行人数量. 然后分别提取并计算每个有效接管片段的接管反应时间、纵向加速度、横向加速度
和与前车碰撞时间, 作为接管绩效评价的指标, 进行后续的对比分析.
3 接管绩效预测及分析模型构建
3.1 接管绩效
接管绩效是一项多维度的评估标准, 它整合了两个核心要素: 接管反应时间与接管驾驶质量. 接管反应时间衡