
Page 46 - 《软件学报》2025年第12期
P. 46
张杨杨 等: 典型驾驶场景下接管绩效预测及特征分析 5427
固定. 这样的研究设计虽然有助于控制变量, 但也可能限制了研究结果的普遍适用性.
与之前的驾驶场景不同, 本实验的驾驶场景基于 CARLA 自带的自动驾驶系统 (ADS) 在指定的城镇地图上行
驶, 驾驶满足法律及路段限速要求, 具有较强的真实性. 参考美国国家公路交通安全管理局 (National Highway
Traffic Safety Administration, NHTSA) 发布的碰撞前情景分类驾驶场景 [31] , 结合国家标准《智能网联汽车 自动驾
驶功能场地试验方法及要求》 [32] 中对于自动驾驶测试场景的要求以及国际标准 ISO 34504 [33] , 选取并构建了在乡
村和城市道路中出现的 6 个安全攸关的驾驶场景, 这些场景涵盖不同事故类型, 分别为车辆切入、右方来车、跟
随前车行驶、行人过马路、十字路口红绿灯通行和自行车穿过人行道, 这些驾驶场景分布在乡村或城市公路上,
道路旁存在各种树木和房屋. 在这些场景中, 驾驶道路均为双向六车道, 前车速度为 30 km/h、车辆切入的 NPC 场
景车速为 35 km/h, 右侧来车的车辆速度为 25 km/h, 行人过马路的速度为 5 km/h, 自行车穿过人行道的速度为 12
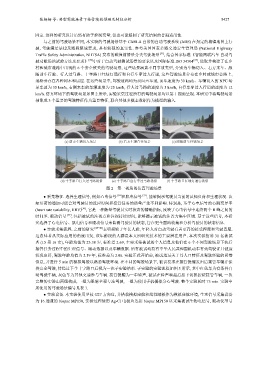
km/h. 仿真环境下的驾驶场景如图 2 所示, 实验采集过程所有的驾驶场景均以第 1 视角呈现. 本研究中将驾驶场景
抽象成 3 个重要的驾驶特征作为重要特征, 联合其他多模态数据作为模型的输入.
(a) 前方车辆切入场景 (b) 右方车辆直行场景 (c) 跟随前车行驶场景
(d) 十字路口行人过马路场景 (e) 十字路口自行车过马路场景 (f) 十字路口红绿灯通行场景
图 2 第一视角的仿真驾驶场景
● 采集特征. 选择生理信号, 例如心电信号 [34] 和肌电信号 [35] , 能够揭示驾驶员当前的认知负荷和生理状况. 认
知负荷的增加可能会对驾驶员的反应时间和接管任务的质量产生不利影响. 特别是, 基于心电信号的心跳变异率
(heart rate variability, HRV) [36] , 它是一种衡量驾驶员实时状态的精确指标, 反映了心电信号中连续两个 R 峰之间的
时间差. 眼动信号 [37] , 包括被试的注视点和注视持续时间, 能够揭示被试的注意力集中区域. 基于这些信号, 本研
究选择了心电信号、肌电信号和眼动信号来监测驾驶员的状态, 旨在更全面地收集和分析驾驶员的状态信息.
● 实验采集流程. 之前的研究 [38−40] 表明相较于年长人群, 年轻人对自动驾驶有着更高的接受程度和驾驶意愿.
这意味着从实际应用的角度出发, 该年龄段的人群是本文所研究技术的主要潜在用户. 本次实验招募 31 名被试
者 (15 男 16 女), 年龄均值为 23.38 岁, 标准差 2.69, 主要采集被试的个人信息及他们在 6 个不同驾驶场景下执行
接管任务过程中的生理信号、眼动数据以及车辆数据. 所有被试均持有中华人民共和国机动车有效驾驶证且健康
状况良好, 驾驶年龄均值为 2.59 年, 标准差为 2.06. 实验正式开始前, 被试填写关于其人口特征及驾驶经验的问卷
信息, 并进行 5 min 的模拟驾驶以熟悉驾驶环境. 在不同的驾驶场景下, 被试要求在接管提醒发出后接管车辆并保
持安全驾驶, 待经过下个十字路口后视为一次子实验结束. 子实验的实验流程如图 3 所示, 其中红色车为有条件自
动驾驶车辆, 灰色车为其他交通参与车辆. 接管提醒为一串铃声, 被试在铃声响起后按下切换按钮接管车辆, 一次
完整的实验由两组构成, 一组为眼睛全程专注驾驶, 一组为使用手机模拟分心驾驶. 整个实验耗时 75 min. 实验中
所使用的驾驶场景编号见表 1.
● 实验设备. 本实验使用罗技 G27 方向盘, 并搭载模拟座舱和线性踏板作为模拟座舱环境, 生理信号采集设备
为 16 通道的 biopac MP150, 实验过程使用 Ag-Cl 电极片连接 biopac MP150 以采集被试生物电信号, 眼动仪型号