
Page 137 - 摩擦学学报2025年第4期
P. 137
第 4 期 赵祥, 等: 非接触式机械密封动特性中的辅助密封研究进展 625
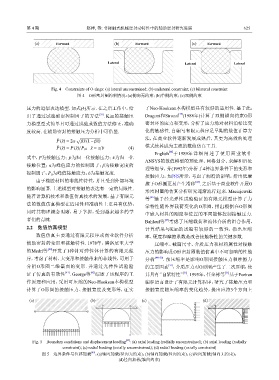
(a) Forward (b) Forward (c) Forward
Lateral Lateral Lateral
Fig. 4 Constraints of O-rings: (a) lateral unconstrained; (b) unilateral constraint; (c) bilateral constraint
图 4 O形密封圈约束情况:(a)侧向无约束;(b)单侧约束;(c)双侧约束
压力的近似表达模型. 如式(4)所示. 在之后工作中,给 了Neo-Hookean本构模型具有较好的适用性. 基于此,
[43]
[39]
出了通过试验确定控制因子的方法 . Kim的接触压 Dragoni和Strozzi (1988年)计算了双侧横向约束O形
力模型型式简单且可通过试验或数值方法修正,准确 密封环的应力和变形,分析了应力场对材料泊松比变
度较高. 在辅助密封的接触压力分析中可借鉴. 化的敏感性. 自编写有限元程序是早期的数值计算方
√ 法,在商业软件逐渐发展成熟后,其更为高效的处理
P ¯ (¯x) = 2α β¯x(1−β¯x)
模式使其成为主流的数值仿真工具.
P ¯ (¯x) = P(¯x)/ P 0 ;¯x = x/b (4)
[44]
English 于1989年详细阐述了使用商业软件
式中,P为接触压力; P ¯为归一化接触压力; ¯ x为归一化
ANSYS的数值模型的预处理、网格划分、求解和后处
接触位置;α为峰值应力的控制因子;β为接触宽度的
理等细节,并(1992年)分析了4种边界条件下的变形和
控制因子;P 为峰值接触应力;b为接触宽度.
0
接触应力,如图5所示,考虑了润滑的影响,指出低摩
由于橡胶材料的非线性特性,并且受到外部环境 [45]
擦下O形圈更易产生滑移 . 之后基于商业软件开展O
的影响显著. 上述模型对接触的表达有一定的局限性.
形密封圈的仿真分析研究逐渐流行起来. Maciejewski
随着计算机技术和数值仿真技术的发展,基于有限元 [46]
等 基于经光弹性试验验证的有限元模型计算了力
法的数值仿真模型在适用性和准确性上更具有优势,
学特性随外界载荷变化的O形圈,指出根据在O形圈
同时其物理概念明晰,易于掌握,受到越来越多的学
中嵌入材料的刚度和位置的不同能够控制接触压力.
者们的青睐. [47]
Bahloul等 考虑了压缩载荷和流体介质的组合作用,
2.2 数值仿真模型 计算结果与Kim的试验有较好的一致性,指出压缩
数值仿真主要通过有限元程序或商业软件分析 率、硬度和摩擦系数是改善接触特性的关键参数.
辅助密封的变形和接触特性. 1978年,博洛尼亚大学 压缩率、截面尺寸、介质压力和材料属性对接触
[40]
的Medri等 开发了1种针对弹性体计算的有限元程 压力的影响是O形密封圈数值仿真中不可忽略的性能
序,考虑了材料、大变形和接触带来的非线性,可用于 分析 [48–50] . 预压缩率是影响O形圈接触压力和摩擦力
分析O形圈二维截面的变形. 并通过光弹性试验验 的主要因素 ,介质压力对O形圈产生了二次压缩,使
[51]
[41]
[42]
证了仿真的有效性 . George等 综述了该程序的工 其具有“自紧特性” . 1995年,任全彬等 基于Fortran
[52]
[53]
作原理和应用,采用可压缩的Neo-Hookean本构模型 编程语言设计了有限元计算程序,研究了接触压力和
计算了O形圈的接触压力、接触宽度及变形等,证实 接触宽度随压缩率的变化趋势,提出应将3个方向上
(a) (b) (c) (d)
[45]
Fig. 5 Boundary conditions and displacement loading : (a) axial loading (radially unconstrained); (b) axial loading (radially
constraint); (c) radial loading (axially unconstrained); (d) radial loading (axially constraint)
[45]
图 5 边界条件与位移加载 :(a)轴向加载(径向无约束);(b)轴向加载(径向约束);(c)径向加载(轴向无约束);
(d)径向加载(轴向约束)