
Page 140 - 摩擦学学报2025年第4期
P. 140
628 摩擦学学报(中英文) 第 45 卷
性是不够的,需要将摩擦特性的影响引入到补偿环动 来的刚度和阻尼对机械密封振动特性的影响,相对于
特性的研究中去. 不考虑辅助密封,考虑辅助密封的振动系统具有更高
的稳定临界值;在分析的几种案例中,适当增大辅助
4 辅助密封刚度和阻尼特性研究 密封的刚度和阻尼具有更优的动态性能. 但不宜过
机械密封的动力学特性分析所需要的是辅助密 大,否则会影响补偿环的动态追随. Hu等 [105] 进行了更
封的刚度和阻尼,而不仅仅是摩擦力. 辅助密封的刚 多的案例分析,结果显示随着辅助密封阻尼的增加,
度和阻尼受到材料属性、介质环境和工况条件等的影 补偿环的重新平衡位置逐渐偏离初始平衡位置,表示
响,且多呈现非线性关系,尚无准确的理论计算模型, 补偿环的追随性丧失. 在角向偏斜的振动分析中发
[93]
多通过试验测量获得. 测量分为直接法和间接法 . 现,大的辅助密封阻尼将会影响角向的稳定性,增大
直接法通过测量辅助密封的力和位移,得到刚度和阻 主密封端面接触的可能性.
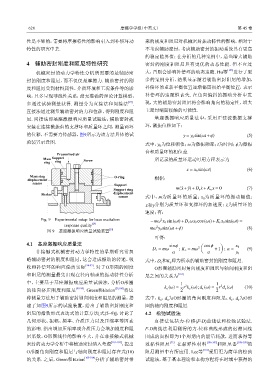
尼. 间接法即基座激振响应质量试验法,辅助密封被 基座激振响应质量法中,采用正弦波激振支撑
安装在连接激振台的支撑环和质量环之间,测量两环 环,激振位移如下:
的位移,不需要力传感器,图9所示为该方法具体的试 y = y 0 sin(ωt +ϕ) (5)
验装置示意图. 式中,y 为位移幅值;ω为激振频率;t为时间;ϕ为激振
0
Pressurized air 台和质量环的相位差.
Mass Support Screw 所记录的质量环运动可用方程表示为
ring ring
x = x 0 sin(ωt) (6)
Mass ring O-ring
displacement 根据:
sensor Support
Support ring m(¨x+ ¨y)+ D e ˙x+ K e x = 0 (7)
Shaker displacement 式中,m为质量环的质量;x 为质量环的振动幅值;
sensor
0
¨ x和¨y 分别为质量环和支撑环的加速度; ˙ x为质量环的
速度;有:
Fig. 9 Experimental setup for base excitation −mω x 0 sin(ωt)+ D e ωx 0 cos(ωt)+ K e x 0 sin(ωt) =
2
[29]
response quality 2
图 9 基座激振响应质量试验装置 [29] mω y 0 sin(ωt +ϕ) (8)
可得:
4.1 基座激振响应质量法 sinϕ Å cosϕ ã
D e = mω ; K e = mω 2 +1 ; α = x 0 (9)
非接触式机械密封动力学特性的早期研究常忽 α α y 0
略辅助密封的刚度和阻尼,这会造成振动的转递、吸
式中,D 和K 即为所求的辅助密封的刚度和阻尼.
e e
收和补偿环的响应偏离实际 [94-97] . 对于O形圈的刚度 O形圈辅助密封角向刚度和阻尼与轴向刚度和阻
和阻尼的测量最先出现在径向轴承的振动特性分析 尼之间的关系为 [101]
中,主要基于基座激振响应质量试验法,分析O形圈 1 1
2
2
k a (ω) = r k z (ω);d a (ω) = r d z (ω) (10)
的径向挤压刚度和阻尼 [98-99] . Green和Etsion [29,100] 将这 2 2
种测量方法用于辅助密封轴向刚度和阻尼的测量,搭 式中,k 、d 为O形圈的角向刚度和阻尼;k 、d 为O形
a
z
a
z
建了如图9所示的试验装置,给出了辅助密封刚度和 圈的轴向刚度和阻尼.
阻尼的指数形式表达式的计算方法[式(5~9)],讨论了 4.2 松弛试验法
几何形状、振幅、频率、介质压力以及压缩率等因素 直接法包括力-位移(F-D)曲线法和松弛试验法.
的影响. 指出增加压缩率或介质压力会增加刚度和阻 F-D曲线法利用测得的力-位移曲线形成的迟滞回线
尼系数,O形圈线径的影响不大,并在非接触式机械 围成的面积即为1个周期内的能量耗散,进而求得等
密封的动力学分析中将辅助密封纳入考虑 [101-102] ,提出 效黏性阻尼 . 在黏弹性材料 [106-107] 和阻尼器 [108-109] 的
[77]
O形圈角向刚度和阻尼与轴向刚度和阻尼存在式(10) 阻尼测量中有所应用. Lee等 [110] 采用更为简单的松弛
的关系. 之后,Green和Etsion [103-104] 分析了辅助密封带 试验法,基于基本理论和本构方程将在时域中获得的