
Page 32 - 《摩擦学学报》2021年第5期
P. 32
第 5 期 董聪慧, 等: 微液滴在PDMS软基体表面的动态摩擦行为研究 621
Micro cantilever
Deionized water
Support Copper tube
PDMS substrate
Displacement platform
Silicon substrate
Laser beam
Drop slip direction θ r θ a
Camera
Droplet
PDMS film
Displacement detector
Droplet slip direction
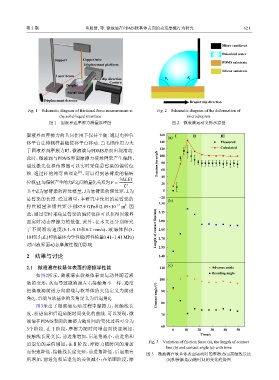
Fig. 1 Schematic diagram of frictional force measurement at Fig. 2 Schematic diagram of the deformation of
the solid-liquid interface microdroplets
图 1 固液界面摩擦力测量原理图 图 2 微液滴运动变形示意图
固液界面摩擦力的共同作用下保持平衡. 通过电控位 160 Ⅰ Ⅱ Ⅲ
(a)
移平台让待测样品随位移平台移动. 当毛细作用力大 140 Measured
120 Calculated
于固液界面摩擦力时,微液滴与PDMS界面出现滑动.
此时,微液滴与PDMS界面摩擦力使悬臂梁产生偏转, 100
通过激光位移传感器可以实时采集悬臂梁的偏转位 Friction force/μN 80
60
[21]
移. 通过杆的纯弯曲理论 ,可以得到悬臂梁的偏转 40
3∆LEI
位移 ∆L与偏转产生的力F之间的量化关系为 F = . 20
L 3
其中E为悬臂梁的弹性模量,I为悬臂梁的惯性矩,L为 0
悬臂梁的长度. 经过测量,本研究中使用的悬臂梁的 −20 (b)
3.30
−15
4
弹性模量和惯性矩分别87.9 GPa和2.89×10 m . 因
此,通过实时采集悬臂梁的偏转位移可以获得固液界 3.15
面实时动态摩擦力的数值. 此外,在本文还分别研究 3.00
了不同滑动速度(0.1、0.15和0.2 mm/s)、液滴体积(5、 Length of contact line/mm 2.85
10和15 μL)和软基体力学性能(弹性模量0.41~1.41 MPa) 2.70
对固液界面动态摩擦性能的影响. 2.55
2 结果与讨论 2.40
(c)
2.1 微液滴在软基体表面的摩擦学性能 110 Advance angle
如图2所示,微液滴在软基体表面运动伴随着液 Receding angle
100
滴的变形,从而导致微液滴左右接触角不一样,通常
把微液滴前进方向前端与软基体的夹角定义为前进 90
角θ ,后端与软基体的夹角定义为后退角θ . Contact angle/(°) 80
r
a
图3示出了微液滴运动过程中摩擦力、接触线长
度、前进角和后退角随时间变化的曲线. 可以发现,微 70
液滴在PDMS表面的摩擦力随时间的变化过程可分为
60
3个阶段. 在Ⅰ阶段,摩擦力随时间增加而快速增加, 0 10 20 30 40 50
接触线长度变长,前进角增加,后退角减小,前进角和 Time/s
后退角的差值增加;在Ⅱ阶段,摩擦力随时间的增加 Fig. 3 Variation of friction force (a), the length of contact
line (b) and contact angle (c) with time
而快速降低,接触线长度变短,前进角降低,后退角有
图 3 微液滴在软基体表面运动时的摩擦力(a)接触线长度
所增加,前进角和后退角的差值减小;在第Ⅲ阶段,摩 (b)和接触角(c)随时间的变化趋势图