
Page 136 - 《摩擦学学报》2020年第3期
P. 136
402 摩 擦 学 学 报 第 40 卷
√ 参数的粗糙表面,有利于分析不同特征表面的回归公
f l P a
ω = z−d +1.12 (43)
E 式和接触特性的原始数据. 然而,由于粗糙表面具有
将上述结论应用于ZMC模型中,Zhao和Chang建 随机性和不平稳性,导致表面形貌的统计参数对确定
立了考虑微凸体相互作用的统计接触模型. 的表面往往具有不确定性,所以建立的粗糙表面接触
Ciavarella和Greenwood等 [65] 假设在较大载荷下, 模型对接触特性的预测结果也就不是唯一的,这是由
接触压力均匀分布在粗糙表面上,并且由此产生的变 于粗糙表面形貌具有多尺度特性,而在一定的测量条
[19]
形也是均匀分布的. 根据Timoshenko和Goodier 的理 件下得到的统计学表征参数并不能够反映表面粗糙
论,当名义接触压力为 P nom时,作用在名义面积 A n 上的 度的全部信息,表现出对仪器分辨率和取样长度的
√
所产生的变形为 mP nom A n (对于Hertz接触, m = 1),因 依赖 [70-72] .
E √ 粗糙表面具有多尺度特性,将其无限放大,更多
此,微凸体的高度将由GW模型中的 z变为 z− P nom A n , [3, 5]
E 更小的细节会显现出来 ,Greenwood和Williamson
考虑微凸体相互作用的微凸体的变形量为 在建模过程中并没有考虑粗糙表面的这种多尺度特
√
P nom A 性,这也是GW模型经常被其他学者提到的缺点之一.
ω = z− −d (44) [73]
E 第一个粗糙表面的多尺度接触模型是由Archard 提
式(44)中, P nom可用迭代法求出,其表达式为 出的,Archard模型中假设较小的微凸体堆叠在较大的
√ 微凸体上,以此来刻画表面的多尺度特性,建立了弹
4 1 3 d P nom A
2 2 + (45)
P nom = ηER σ F 3 性变形范围内的多尺度接触模型,该模型的提出甚至
3 2 σ Eσ
早于GW模型,后续又有学者对Archard模型进行了完
式(45)中, F 3 (h)的表达式为
2 善和扩展 [74-76] . 文献[77-78]中的多尺度接触模型的建
∫ ∞
1 3 2
2
F 3 (h) ≡ √ (s−h) exp(−0.5s )ds (46) 模思路与Archard模型相同,文献[77]中的多尺度模型
2
2π h
还考虑了微凸体的弹塑性变形. 也有学者称这类模型
将式(44~46)代入GW模型中,在文献[65]中基于
[7]
为“叠层多尺度模型” ,模型假设不同尺度上微凸体
GW模型建立了考虑微凸体相互作用的粗糙表面接触
的总载荷相同,同一尺度上微凸体的载荷相同,由此
模型.
得到的实际接触面积和接触载荷为
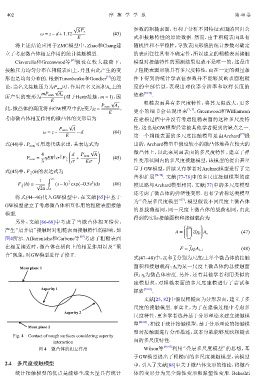
另外,文献[66-68]中考虑了当微凸体相互错位,
i max
产生“肩并肩”接触时对粗糙表面接触特性的影响,如 ∏
A = a i η iA n (47)
[69]
图4所示. Afferrantehe和Carbone等 考虑了粗糙表面 i=1
在相互接近时,微凸体在横向上的相互作用以及“聚
F = f i η i A i−1 (48)
合”现象,对GW模型进行了修正.
式(47~48)中, a i 和 分别为尺度 i上单个微凸体的接触
f i
面积和接触载荷; A i为某一尺度上微凸体的总接触面
Mean plane 1
积; η i 为微凸体密度. 另外,还有其他学者利用类似的
建模思想,对粗糙表面的多尺度建模进行了尝试和
Asperity 1 [79-81]
探索 .
文献[25, 82]中假设粗糙面为分形表面,建立了多
尺度的接触模型. 事实上,为了在建模过程中考虑多
Asperity 2
尺度特性,更多学者选择基于分形理论来建立接触模
型 [82-85] ,相较于统计接触模型,基于分形理论的接触模
Mean plane 2
型对接触面进行分形描述,这本身就能够反映粗糙表
Fig. 4 Contact of rough surfaces considering asperity
面的多尺度特性.
interaction
图 4 微凸体的相互作用 Wilson等 [86-87] 利用“叠层多尺度模型”的思想,基
于GW模型提出了粗糙面的多尺度接触模型,该模型
2.4 多尺度接触模型 中,引入了文献[88]中关于微凸体变形的结论,将微凸
统计接触模型的优点是能够生成大量具有统计 体的变形分为完全弹性变形和弹塑性变形. Beheshti