
Page 36 - 《中国医疗器械杂志》2026年第2期
P. 36
Chinese Journal of Medical Instrumentation 2026年 第50卷 第2期
医 疗 机 器 人
3.2.2 实验结果分析 位状态时进行人为干扰操作后,机器人辅助复位能
表2所示为模拟相同肌肉收缩力下的骨折复位 够保持良好的位姿状态,整个系统具备较好的抗干
实验结果,由表格数据可知绕x轴、y轴和z轴旋转 扰能力。在整个复位过程中,内窥镜实时监测骨折
角度的平均误差值分别为1.163°、0.007°和0.003°, 远端的状态,如图14所示。
最大误差值分别为1.979°、0.009°和0.005°;沿股骨 280 目标值 实际值 6 目标值 实际值
轴向、正位及侧位的平均误差值分别为1.135 mm、 270 4
1.163 mm和0.956 mm,最大误差值分别为1.886 mm、 位移/mm 260 角度/(°) 2
250
2.300 mm和1.313 mm。上述结果满足临床功能性 240 0
复位标准,即成角移位控制在小于5°的范围内,短 230 0 20 40 60 80 100 120 −2 0 20 40 60 80 100 120
时间/s 时间/s
缩移位不超过10 mm。 (a) 关节3跟踪曲线 (b) 关节4跟踪曲线
(a) Tracking curve of joint 3 (b) Tracking curve of joint 4
表2 相同肌肉收缩力下的骨折复位实验结果
98 目标值 实际值 94 目标值 实际值
Tab.2 Experimental results of fracture reduction under identical muscle 96
contraction forces 94 92
x轴–绕 y轴– z轴–绕 股骨 正位 侧位 角度/(°) 92 角度/(°) 90
90
股骨 绕膝 旋转 轴向 拉力/ 88
周向/ 关节/ 装置/ 位移/ 误差/ 误差/ N 86 88
(°) (°) (°) mm mm mm 84 86
0 20 40 60 80 100 120 0 20 40 60 80 100 120
时间/s 时间/s
第一次 1.285 0.007 0.002 0.518 2.300 1.200 138 (c) 关节5跟踪曲线 (d) 关节6跟踪曲线
(c) Tracking curve of joint 5 (d) Tracking curve of joint 6
第二次 0.226 0.009 0.002 1.886 0.968 0.354 139
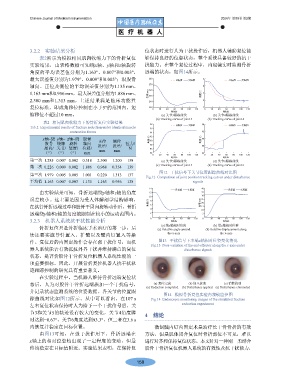
图12 干扰信号下关节位置跟踪曲线对比图
第三次 1.979 0.005 0.005 1.001 0.220 1.313 137
Fig.12 Comparison of joint position tracking curves under disturbance
平均值 1.163 0.007 0.003 1.135 1.163 0.956 138 signals
14 目标值 实际值 40 目标值 实际值
由实验结果可知,骨折远端绕y轴和z轴的角度 12 35
30
10
误差较小。这主要是因为受人体解剖学结构影响, 角度/(°) 8 位移/mm 25
20
在执行骨折远端过牵和股骨干周向旋转动作后,骨折 6 15
4
10
远端绕y轴和z轴的角度被限制在较小的运动范围内。 2 5
60
60
3.2.3 机器人系统抗干扰性能分析 0 20 40 时间/s 80 100 120 0 20 40 时间/s 80 100 120
(a) 绕x轴相对角度 (b) 沿x轴相对位移
骨折复位只是骨折临床手术治疗的第一步,后 (a) Relative angle around (b) Relative displacement along
续还要实施导针置入、扩髓以及髓内钉置入等操 the x-axis the x-axis
作。复位后的内固定操作会存在强干扰信号,而机 图13 干扰信号下末端x轴相对位姿变化情况
Fig.13 Pose variation of the end-effector along the x-axis under
器人系统能否有效抵抗外界干扰并维持满意的复位 disturbance signals
状态,是评价股骨干骨折复位机器人系统性能的一
项重要指标。因此,开展骨折复位机器人抗干扰轨
迹跟踪控制的研究具有重要意义。
在实验过程中,当机器人维持骨折远端复位状
态后,人为对股骨干骨折远端施加一个干扰信号, (a) 复位完成 (b) 加入扰动 (c) 消除扰动
(a) Reduction completed (b) Disturbance applied (c) Disturbance eliminated
并记录状态监测系统的位姿数据。各关节的位置跟
图14 模拟骨折复位实验内窥镜监控图
踪曲线对比如图12所示。从中可以看出,在107 s Fig.14 Endoscopic monitoring images of the simulated fracture
左右复位状态保持时人为给予一个干扰信号后,关 reduction experiment
节3和关节5的轨迹没有较大的变化,关节4角度瞬 4 结论
时达到−0.67°,关节6角度达到93.3°,但二者在3.6 s
内恢复并稳定在目标位置。 微创髓内钉内固定术是治疗长干骨骨折的有效
由图13可知,在强干扰作用下,骨折远端在 方法,但是肌体闭合复位时骨折部位不可见,难以
x轴上的相对位姿均出现了一定程度的变动,但最 进行对齐和保持复位状态。本文针对一种刚-柔结合
终均稳定在目标值附近。实验结果表明,在保持复 股骨干骨折复位机器人系统的有效性及抗干扰能力,
150