
Page 35 - 《中国医疗器械杂志》2026年第2期
P. 35
Chinese Journal of Medical Instrumentation 2026年 第50卷 第2期
医 疗 机 器 人
实验平台的控制系统主要包括上位机PC、主 (2)针对任意位姿下的骨折状态,对骨折复
控制器、传感器组合、电机驱动器、电磁阀组等模 位机器人的关节轨迹采用五次非均匀B样条曲线进
块。主控制器选用意法半导体(STMicroelectronics) 行规划。
生产的STM32F103ZET6作为主控芯片;通过Keil (3)按照临床复位操作控制关节工作的启停
uVision5集成开发环境,将控制算法、路径规划逻 时间,原则为:①开始时刻,由于绕股骨周向的旋
辑、电机及电磁阀驱动指令、传感器信号采集等相 转和沿股骨轴向的牵引互不干涉,牵引机构和绕股
关嵌入式代码编译后,烧录至该主控芯片中。系统 骨周向旋转机构同步工作;②第50 s时,即骨折断
运行后,主控制器将驱动信号发送给各电机驱动器 端过牵后,柔性夹持装置的侧位气囊开始工作;
和电磁阀,从而控制电机的运动和软体驱动器的充 ③第75 s时,柔性夹持装置的正位气囊开始工作。
放气动作。 (4)复位完成后,保持机器人各驱动器的输
传感器组合构成机器人状态监测系统。检测旋 出量,以维持骨折远端位姿。
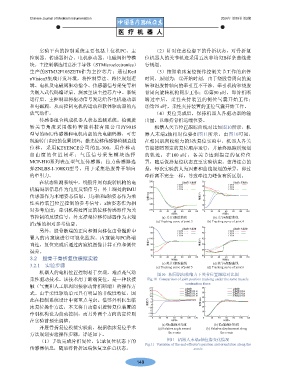
转关节角度采用维特智能科技有限公司JY901S 机器人关节位置跟踪曲线对比如图10所示,机
型号的IMU传感器和电机内部的光电编码器,可实 器人末端x轴相对位姿如图11所示。由图10可知,
现旋转自由度的位置闭环;激光位移传感器检测直线 在相同肌肉收缩力的3次复位实验中,机器人各关
位移,采用KEYENCE公司的IL-300,用作移动 节能按照预定的复位顺序运行,并最终跟踪所规划
自 由 度 的 位 置 闭 环 ; 气 压 信 号 采 集 模 块 选 择 的轨迹;在100 s时,各关节达到指定的复位位
MCP-H10系列表压型气压传感器;拉力传感器选 置,随后保持复位状态直至实验结束。值得注意的
择ZNLBS-I-100KG型号,用于采集沿股骨干轴向 是,每次实验的人为因素和曲线规划的差异,即过
的牵引力。 牵距离不完全一样,导致牵拉力峰值有所区别。
在状态监测系统中,绕股骨周向旋转机构的电 280 目标值 实际值 15 目标值 实际值
138 N 138 N
270 139 N 10 139 N
机编码器信息作为角度反馈信号;外上踝处的IMU 137 N 5 137 N
传感器作为末端姿态信息,其y轴和z轴姿态作为柔 位移/mm 260 角度/(°) 0
250
−5
性夹持装置位置控制的参考信号,x轴姿态作为相 240 −10
对参考角度;牵引机构处固定的位移传感器作为关 230 0 20 40 60 80 100 120 −15 0 20 40 60 80 100 120
时间/s 时间/s
节控制的反馈信号,外支撑架位移传感器作为末端 (a) 关节3跟踪曲线 (b) 关节4跟踪曲线
(a) Tracking curve of joint 3 (b) Tracking curve of joint 4
沿x轴的相对参考信息。
120 目标值 实际值 96 目标值 实际值
另外,股骨断端的正向和侧向移位由骨髓腔中 138 N 138 N
110 139 N 94 139 N
置入的内窥镜进行可视化监控,内窥镜与PC终端 100 137 N 92 137 N
直连,复位完成后通过内窥镜图像计算正位和侧位 角度/(°) 90 角度/(°) 90
误差。 80 88
3.2 股骨干骨折复位模拟实验 70 0 20 40 时间/s 80 100 120 86 0 20 40 时间/s 80 100 120
60
60
(d) 关节6跟踪曲线
(c) 关节5跟踪曲线
3.2.1 实验步骤 (c) Tracking curve of joint 5 (d) Tracking curve of joint 6
机器人的电机位置控制易于实现,难点是气动 图10 相同肌肉收缩力下关节位置跟踪对比图
柔性驱动技术。该技术用于断端复位,是一种软接 Fig.10 Comparison of joint position tracking under the same muscle
contraction force
触(气囊和人工肌肉间接驱动骨折断端)的操作方 25 60
20 目标值 目标值
实际值138 N
实际值138 N
式。由于柔性驱动单元具有明显的非线性特征,因 15 实际值139 N 50 实际值139 N
10 实际值137 N 40 实际值137 N
此在控制系统设计中需重点考虑。借鉴外科医生临 角度/(°) 5 0 位移/mm 30
−5
床复位操作方法,本文将自动牵引旋转复位装置的 −10 20
−15 10
牵引机构设为自动控制,而另外两个方向的定位则 −20
−25
0 20 40 60 80 100 120 0 20 40 60 80 100 120
在实验前预先调整。 时间/s 时间/s
(a) 绕x轴相对角度 (b) 沿x轴相对位移
开展骨折复位模拟实验前,根据临床复位手术 (a) Relative angle around (b) Relative displacement along
方法规划实验操作步骤,详述如下。 the x-axis the x-axis
(1)手动完成骨折复位,记录复位状态下的 图11 机器人末端x轴位姿变化情况
Fig.11 Variation of the end-effector's position and orientation along the
传感器信息,随后将骨折远端恢复至任意状态。 x-axis
149