
Page 11 - 《中国医疗器械杂志》2026年第2期
P. 11
Chinese Journal of Medical Instrumentation 2026年 第50卷 第2期
医 疗 机 器 人
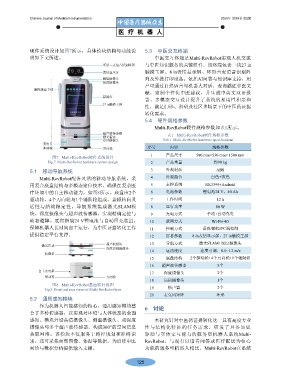
硬件系统设计如图7所示,具体模块结构与功能说 5.3 中医交互终端
明如下文所述。 中医交互终端是Multi-RevRobot实现人机交流
环形六麦语音识别阵列 与中医知识服务的关键组件。该终端包含一块27 in
表情显示屏 触摸主屏、8 in表情显示屏、环形六麦语音识别阵
测温摄像头 列及外接打印设备。依托AI问答与知识库支持,用
深度摄像头
户可通过自然语言与机器人对话,查询循证中医文
触摸感应手臂
献,定制个性化中医建议,并生成中英文双语报
氛围灯
告。多模态交互设计提升了系统的易用性和亲和
27 in触摸主屏
性,满足门诊、科研及社区多场景下的中医药证据
转化需求。
5.4 硬件规格参数
Multi-RevRobot硬件规格参数如表1所示。
超声波传感器 表1 Multi-RevRobot硬件规格参数
激光雷达
双目摄像头 Tab.1 Multi-RevRobot hardware specifications
充电口
驱动轮 万向轮 序号 内容 规格参数
1 产品尺寸 580 mm×530 mm×1 500 mm
图7 Multi-RevRobot硬件系统设计
Fig.7 Multi-RevRobot hardware system design 2 产品重量 约90 kg
5.1 移动导航系统 3 外观材质 ABS
Multi-RevRobot配备灵活的移动导航系统,采 4 外观颜色 白色+灰色
用复合底盘结构与多模态定位技术,确保在复杂医 5 主控系统 RK3399+Android
疗环境中的自主移动能力,如图8所示。底盘由2个 6 电池参数 锂电池24 V,40 Ah
驱动轮、4个万向轮与1个辅助轮组成,兼顾转向灵 7 工作时间 12 h
活性与结构稳定性。导航系统集成激光SLAM模 8 运行功率 80 W
块、深度摄像头与超声波传感器,实现精确定位与 9 充电方式 手动+自动充电
动态避障。底盘搭载24 V锂电池与自动回充装置, 10 联网方式 Wi-Fi+4G
保障机器人长时间自主运行,为中医证据转化工作 11 控制方式 语音/触控/PC端控制
提供稳定平台支撑。 12 屏幕参数 8 in表情显示屏,27 in触摸主屏
超声波模块 13 导航方式 激光SLAM+深度摄像头
激光雷达
深度识别摄像头
14 运动速度 速度可调,0.1~1.2 m/s
防撞条
15 底盘结构 2个驱动轮+4个万向轮+1个辅助轮
16 超声波传感器 5个
自主充电条
17 深度摄像头 2个
驱动轮 万向轮
18 高清摄像头 1个
图8 Multi-RevRobot基座前后视图
Fig.8 Front and rear views of Multi-RevRobot base 19 扬声器 2个
20 麦克风矩阵 环形
5.2 通用感知模块
作为机器人智能感知的核心,通用感知模块整 6 讨论
合了多种传感器,以实现对环境与人体状态的全面
感知。模块外设高清摄像头、测温摄像头、双深度 本研究针对中医药证据转化这一具有高度专业
摄像头与多个超声波传感器,构成360°的空间信息 性与结构化特征的任务需求,研发了具备知识
获取网络。该模块不仅服务于路径规划和障碍识 驱动与实体交互能力的服务型机器人系统Multi-
别,还可采集面部图像、体温等数据,为后续中医 RevRobot。与现有以语音问答或医疗配送为核心
问诊与数据分析提供输入支撑。 功能的服务型机器人相比,Multi-RevRobot在系统
125