
Page 48 - 《中国医疗器械杂志》2026年第1期
P. 48
Chinese Journal of Medical Instrumentation 2026年 第50卷 第1期
研 究 与 论 著
[2]
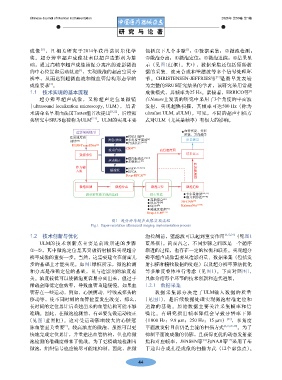
成像 [21] ,且相关研究于2014年获得诺贝尔化学 包括以下几个步骤 :①数据采集;②微泡检测;
奖。超分辨率超声成像技术以超声造影剂为基 ③微泡分离;④微泡定位;⑤微泡追踪;⑥结果显
础,通过高帧率超声成像捕捉分离出的造影微泡 示(见图1红框)。其中,数据采集还包括原始数
[1]
的中心位置和运动轨迹 ,实现微泡的超高空间分 据的采集、波束合成和壁滤波等多个信号处理环
辨率,从而达到超微血流和微血管结构形态学的 节。CHRISTENSEN-JEFFRIES等 [23] 是最早发表较
[4]
成像要求 。 为完整的SRUS研究结果的学者,该研究采用常规
1.1 技术实现的基本流程 成像模式,其帧率为25 Hz。紧接着,ERRICO等 [4]
超分辨率超声成像,又称超声定位显微镜 在Nature上发表的研究中采用了3个角度的平面波
( 发射,实现超快扫描,其帧率可达500 Hz(称为
ultrasound localization microscopy, ULM) , 后 者
术语命名早期由法国Tanter组首次提出 [4,22] ,后续相 ultrafast ULM, uULM)。可见,不同的超声扫描方
关研究中SRUS也被称为ULM [5-9] 。ULM的实现主要 式对ULM(尤其是帧率)有很大的影响。
血管密度、分形
造影剂的使用 维数、方向熵等
注射速度和 传统扫描 [23] [4] 定量测量
剂量 [69] 发射/接收 多角度平面波
合成孔径
[16-17]
ULM-TransUNet [58]
波束合成 CNN [54] 血管密度图
数据采集 结果显示
横向振荡法 [16-17]
运动校正 多级校正 [9]
作为输 SVD [6, 12-13, 16]
入源 壁滤波 RPCA 血流速度图
Deep-RPCA [56]
微泡检测 微泡分离 微泡定位 微泡追踪
超分辨算法实现的基础 核心算法 卡尔曼滤波 [13, 51]
匈牙利算法 [45-46]
高斯拟合 [41] [55]
形态学 [28] 3D-CNN
NCC [42] KalmanNet [47-48]
稀疏反卷积 [43]
Deep-ULM [8, 14]
图1 超分辨率超声成像实现流程
Fig.1 Super-resolution ultrasound imaging implementation process
1.2 技术创新与优化 泡检测前,壁滤波可以起到重要作用 [6,12,24] (见图1
ULM的技术创新点主要是前段所述的步骤 蓝黑框)。简而言之,不同步骤之间既是一个循序
②~⑤ ,其中微泡定位是其突破衍射极限实现超分 渐进的过程,也存在一定的权衡和联系。实现超分
辨率成像的重要一步。当然,这需要建立在前面几 辨率超声成像需要从造影剂量、数据采集(包括发
步的基础上才能实现。如图1绿框所示,微泡检测 射扫描和接收数据的处理)以及超分辨率算法优化
和分离是准确定位的基础,且与造影剂的浓度有 等多维度整体串行考虑(见图1)。下面对照图1,
关。浓度较低可以使微泡更容易分离出来,但过于 具体介绍每个环节的技术创新和迭代进展。
稀疏会降低定位效率,导致血管重建缓慢。如果血 1.2.1 数据采集
管存在一些运动,例如,心脏搏动、呼吸或探头的 数据采集部分决定了ULM输入数据的质量
移动等,使不同时刻的血管位置发生改变,那么, (见图1),是后续数据处理实现微泡精准定位和
长时间的定位累计后重建出来的血管结构可能不够 追踪的基础。原始数据主要关注采集帧率和信
准确。因此,在微泡检测前,有必要先做运动校正 噪比。有研究指出帧率降低会导致分辨率下降
见图1蓝黑框)。这对受运动影响较大的心脏冠
( ( [25]
1 000 Hz:9.9 µm;250 Hz:15 µm) ,多角度
[9]
脉血管至关重要 。较高浓度的微泡,虽然可以更 平面波发射目前仍是主流的扫描方式 [4,13,26-28] 。为了
快地完成定位累计,并重建出血管结构,但也给微 抑制平面波成像的伪影,且获得更优的动态发射聚
[17]
[16]
泡检测的准确度带来了挑战。为了更精确地检测出 焦和对应帧率,JENSEN等 和NAJI等 采用了基
微泡,组织信号也应被尽可能地抑制。因此,在微 于递归合成孔径成像的扫描方式(12个虚焦点)。
44