
Page 50 - 《中国医疗器械杂志》2025年第2期
P. 50
Chinese Journal of Medical Instrumentation 2025 年 第49卷 第2期
综 合 评 述
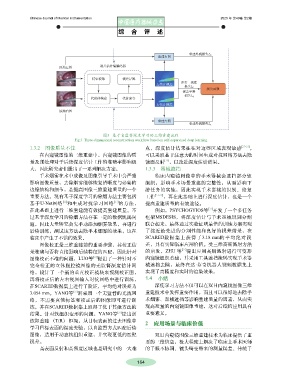
重建右图 重建外观损失L R
原始左图 视差估计编解码器
特征提取 视差计算
左右一致性
左估计视差
损失L C
损失函数
视差平滑
损失L d
代价体构建 代价聚合
右估计视差
原始右图
重建左图
重建外观损失L L
图3 基于自监督深度学习的三维重建流程
Fig.3 Three-dimensional reconstruction workflow based on self-supervised deep learning
1.3.2 图像质量不佳 点,深度估计结果往往对这些区域表现敏感 [27-29] 。
在内窥镜图像的三维重建中,内窥镜图像的质 可以采取基于注意力的时间生成对抗网络方法去除
量及预处理对于后续深度估计工作的准确率影响极 镜面反射 ,以改进深度估计结果。
[30]
大,因此研究者们提出了一系列解决方案。 1.3.3 器械遮挡
手术烟雾在术中成像及图像引导手术中会严重 临床内窥镜图像中的手术器械会遮挡部分软
影响图像质量,去除烟雾能够恢复清晰度与必要的 组织,影响手术场景重建的完整性,从而影响下
边缘结构和细节,是提高图像三维重建质量的一个 游任务的实施,因此实现手术器械的识别、修复
重要方法。现有基于深度学习的除烟方法主要包括 工作 [31-32] ,再在此基础上进行深度估计,也是一个
[22]
[23]
基于U-Net网络 和生成对抗学习网络 的方法, 提高重建质量的有效途径。
在此基础上进行三维重建能有效提高重建质量。不 例如,PSYCHOGYIOS等 开发了一个多任务
[33]
过基于深度学习的除烟方法存在一定的数据饥渴问 框架MSDESIS,将深度估计与手术器械识别分割
题,因此大量研究会先手动添加烟雾效果,再进行 联合起来,最终通过实验证明最佳的训练方案实现
后续训练,测试该方法去除手术烟雾的效果,这在 了接近最先进的分割性能和良好的视差结果,在
临床中产生了不错的效果。 SCARED数据集上获得了3.18 mm的平均绝对误
图像校正是三维重建前的重要步骤,其校正结 差,具有实际临床应用价值。受三维高斯溅射方法
[34]
果准确与否将直接影响后续特征的匹配,因此针对 的启发,ZHU 等 提出应用高斯溅射进行可变形
图像校正不准的问题,LUO等 提出了一种针对不 内窥镜组织重建,并采用工具遮挡掩码实现手术器
[24]
完全校正的立体腹腔镜图像的无监督深度估计网 械遮挡去除,最终在达·芬奇机器人视频数据集上
络,设计了一个新的垂直校正模块来预测校正图, 实现了高精度和实时的渲染效果。
再将校正后的左右视图输入对抗网络中进行训练, 1.4 小结
在SCARED数据集上进行了验证,平均绝对误差为 深度学习方法不仅可以在双目内窥镜图像三维
3.054 mm。YANG等 则采用一个无监督的光流网 重建技术中发挥重要作用,而且可以很好地去除手
[25]
络,不需要真值标签和校正后的图像即可进行训 术烟雾、器械遮挡等影响重建质量的因素,从而实
练,并在SCARED数据集上取得了优于其他方法的 现高质量的内窥镜图像重建,这对后续的应用具有
[26]
结果。针对软组织变形的问题,YANG等 提出训 重要意义。
练即重建 (TiR) 框架,从目标表面的过去图像中
2 应用场景与临床价值
学习目标表面的深度先验,以自监督方式匹配后续
图像,适用于动态软组织重建,并实现更低的匹配 双目内窥镜图像三维重建技术为临床提供了重
误差。 要的三维信息,极大程度上解决了临床上手术医师
高表面反射和高强度区域也是研究中的一大难 的手眼不协调、镜头畸变带来的测量误差、传统手
164