
Page 48 - 《中国医疗器械杂志》2025年第2期
P. 48
Chinese Journal of Medical Instrumentation 2025 年 第49卷 第2期
综 合 评 述
操作简单、精度较高等突出优势,应用广泛;直接
获取的立体图像一般存在畸变现象,且左右图像并
m′ 没有进行对齐,因此需要完成畸变校正和立体校
m 正。完成校正后的图像对经过立体匹配即可获得视
差图,立体匹配算法一般包括匹配代价计算、代价
[2]
聚合、视差计算和视差优化四个步骤 。经过立体
M 匹配得到视差图,基于视差与深度的转换公式,将
t+1
M 视差图转换成深度图,再根据世界坐标到图像的映
t
射关系,即可获得具有深度信息的三维数据,同时
可根据具体使用场景选择合适的三维场景表示方
[3]
式,如点云、Surfel 、截断符号距离函数 (truncated
signed distance function, TSDF)等,大多数研究方
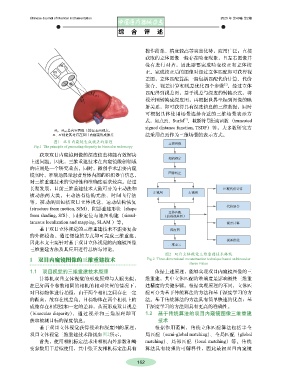
M t 、M t+1 是真实图像上的左右两视点,
m、m'则是其对应在双目内窥镜的成像点 法采用点云作为三维场景的表示方式。
图1 双目内窥镜生成视差的原理 立体图像
Fig.1 The principle of generating disparity in binocular endoscopy
获取双目内窥镜图像的深度信息将能有效解决
相机标定
上述问题。因此,三维重建技术在内窥镜微创领域
的应用是一个研究重点。同时,微创手术需要内窥
镜实时、准确地展示患者身体内部的组织器官信息, 图像校正
对三维重建技术的实时性和准确度要求较高。经过
长期发展,目前三维重建技术大致可分为主动法和 匹配代价计算
左视图 右视图
被动法两大类。主动法有结构光法、时间飞行法
等,被动法则包括双目立体视觉、运动结构恢复
代价聚合
( structure from motion, SfM)、阴影重建形状(shape
立体匹配
from shading, SfS)、同步定位与地图构建(simul- (获得视差图)
taneous localization and mapping, SLAM )等。 视差计算
基于双目立体视觉的三维重建技术不需要复杂 深度图
的外部设备,通过便捷的方式即可完成三维重建,
因此本文主要针对基于双目立体视觉的内窥镜图像 视差优化
三维点云
三维重建方法及其应用进行总结与讨论。
图2 双目立体视觉三维重建技术路线
1 双目内窥镜图像的三维重建技术 Fig.2 Three-dimensional reconstruction technique based on binocular
stereo vision
1.1 双目视觉的三维重建技术原理 依据上述原理,能够实现双目内窥镜图像的三
计算机双目立体视觉的形成原理与人眼类似, 维重建,其中立体匹配的准确度是影响最终三维重
在已知两个参数相同的相机的相对位置的情况下, 建精度的关键步骤。根据实现原理的不同,立体匹
对目标物体进行拍摄,由于两个相机之间存在一定 配可分为基于传统算法的方法和基于深度学习的方
的距离,故存在视差角。目标物体在两个相机上的 法。基于传统算法的方法具有简单快速的优点;基
成像存在相似性和一定的差异,从而形成双目视差 于深度学习的方法则具有更高的准确性。
binocular disparity),通过视差和三角原理即可
( 1.2 基于传统算法的双目内窥镜图像三维重建
获取被测目标的深度信息。 技术
基于双目立体视觉获得视差和深度图的原理, 根据作用范围,传统立体匹配算法包括半全
双目立体视觉三维重建技术路线如图2所示。 局匹配(semi-global matching)、全局匹配(global
首先,使用相机标定法求出相机内外参数和畸 matching)、局部匹配(local matching)等。传统
变参数用于后续使用,其中张正友相机标定法具有 算法具有较强的可解释性,因此最初双目内窥镜
162