
Page 184 - 《振动工程学报》2026年第3期
P. 184
784 振 动 工 程 学 报 第 39 卷
的可比性。因此,实践中获取理想的类比工点往往 (远离相邻隧道一侧),高于轨顶面 1.25 ±0.25 m(本
较为困难,且由于很难匹配所有的类比条件,往往需 文统一取为 1.5 m)。光电速度传感器与其对侧设置
要对实测结果进行修正。此外,也需投入较高的人 的反光板构成一套光电测速测量系统(后文简称为
力和物力成本。 光电门),列车通过时会遮挡光源,通过电压波动可
随着地铁运营里程的增加和环境振动跟踪测试 获得过车时间,再结合给定的车长即可获得列车通
的不断开展,振动源强实测样本愈加丰富。为了弥 过测试断面的瞬时速度。测点布置如图 1 所示。
补类比测试法的局限性,许多研究者开始使用机器
学习方法对地铁环境振动进行预测。CONNOLLY
等 [11] 考虑土体条件、埋深、列车速度和距离等因素,
提 出 了 基 于 神 经 网 络 算 法 的 地 表 振 动 预 测 方 法 。
PANEIRO 等 [12] 考虑列车速度、距离、轨道类型、土
体条件和建筑类型,采用多元线性回归预测了地表
振动。邱瑞辰 [13] 考虑了列车速度、振源深度、距离、
阻尼比、密度、泊松比和剪切波速等因素,采用神经
网 络 算 法 对 地 表 最 大 Z 振 级 进 行 了 预 测 。 YAO
等 [14] 考虑列车车速、车型、土体条件和建筑物高度等
因素,采用支持向量机算法预测了建筑物内各楼层
的最大 Z 振级。王秀丽等 [15] 通过径向基神经网络实
现了对地铁振动振级曲线的拟合和峰值预测。张中 图 1 测点布置示意图
帅 [16] 构建了车辆⁃轨道⁃隧道⁃地层模型,以振动源强 Fig. 1 Schematic diagram of measurement points layout
数值计算结果作为数据集,采用 BP 神经网络和支
系统采样频率为 1000 Hz,加速度传感器灵敏
持向量机进行了训练和预测,并在实测数据上进行
度为 100 mV/(m/s),量程为 50 m/s ,采样时间为
2
2
迁移学习。
凌晨 3 点至次日零点。
总体而言,由于实测样本较少,已有的基于数据
驱动方法的预测工作主要依赖数值模拟方法构建数 1. 2 数据处理方法
据集;不仅如此,现有大部分预测工作主要针对地表
或建筑物振动,关于振动源强预测的工作仍十分匮 现场测试时,各断面均采用无人值守的连续采
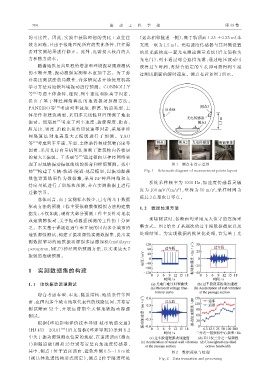
乏。本文基于课题组近年来开展的国内多个城市的 集方式。图 2 给出了某趟次的过车段数据截取以及
地铁源强测试,构建了振动源强实测数据集,提出实 处理结果。为实现数据的批量化处理,首先基于光
测数据驱动的地铁振动源强多层感知机(multilayer
perceptron,MLP)神经网络预测方法,以实现最大 Z
振级的准确预测。
1 实测数据集的构建
1. 1 地铁振动源强测试
综合考虑车型、车速、隧道结构、地质条件等因
素,在国内多个城市选取代表性的线路区间,共布置
测试断面 52 个 ,开展运营期全天候地铁振动源强
测试。
根据《环境影响评价技术导则 城市轨道交通》
[17]
(HJ 453―2018) (后文简称《环评导则》)条例 B.2
中关于振动源强测点位置的规定,在道床顶面(测点
1)和隧道壁(测点 2)分别布置竖向加速度传感器,
其中,测点 1 位于道床顶面、近轨外侧 0.5~1.0 m 处 图 2 数据截取与处理
(视具体轨道结构形式而定),测点 2 位于隧道壁处 Fig. 2 Data truncation and processing