
Page 226 - 《振动工程学报》2025年第11期
P. 226
2684 振 动 工 程 学 报 第 38 卷
外圈挤压滚动体产生的接触形变量; δ c 为总接触形 y 等效弹簧模型
变量; δ r 为内/外圈相对位移量。 O
第 m 个滚动体的形变量 δ m 与 的关系为: O′
δ r
1 O
δ m = δ r cosθ m − h c (5) 简化模型
2 O′ x
式中, θ m 为第 m 个滚动体位置角。 内圈
设轴承共有 Z 个滚动体,以逆时针方向对滚动 δ i
δ o
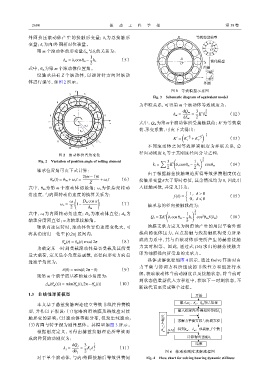
体进行编号,如图 2 所示。 外圈
y 图 3 等效模型示意图
7 6
Fig. 3 Schematic diagram of equivalent model
8 5
为串联关系,可得第 m 个滚动体等效刚度为:
3 1
dQ m 2
k m = ′ (12)
9 ω i 4 = K δ m
dδ m 2
O
′
x 式中, Q m 为第 m个滚动体所受接触载荷; K 为等效载
ω c t
10 3 荷-形变系数,可由下式得出:
θ Im
)
( 2 − 3
2 2
− −
K = K 3 3 (13)
′
ω c i + K o
11 2
不同滚动体之间等效弹簧刚度为并联关系,总
12 1
径向动刚度 k t 等于其刚度径向分量之和:
图 2 滚动体位置角变化
1
( )
Fig. 2 Variation of position angle of rolling element ∑ 3 1 2
′
k t = K δ r cosθ m − h c cosθ m (14)
2 2
轴承位置角可由下式计算:
由于根据赫兹接触理论所得等效弹簧刚度仅在
2(m−1)π
θ m (t) = θ Im +ω c t = +ω c t (6) 接触形变量 δ大于零时有值,其余情况均为 0,因此引
Z
式中, θ Im 为第 m 个滚动体初始角; ω c 为保持架转动 入接触函数,并定义其为:
{
角速度,与内圈转动角速度的换算关系为: f(δ) = 1,δ > 0 (15)
( ) 0,δ ⩽ 0
D w cosα
ω i
ω c = 1− (7) 轴承总的径向接触载荷为:
2 d m
3
)
(
式中, ω i 为内圈转动角速度; D w 为滚动体直径; d m 为 1 2
′ 2 (16)
Q r = ΣK δ r cosθ m − h c cos θ m f(δ m )
轴承分度圆直径; α为轴承接触角。 2
轴承高速运转时,滚动体位置角速度变化大,可 油膜支承力定义为润滑油产生的用以平衡外部
将其角度归一化至 [0,2π] 区间内: 载荷的流体压力,在点接触与线接触机构受力所形
′
θ (t) = θ m (t) mod 2π (8) 成的力系中,其与由滚动体形变所产生的赫兹接触
m
为确定某一时刻受载滚动体是否受载及其所受 力实时相等。因此,通过式 (16) 求出的赫兹接触力
即为油膜径向所受总的支承力。
最大载荷,定义最小角度差函数,离径向形变方向最
近滚子角度为: 具体求解流程如图 4 所示,通过 fsolve 算法对由
力平衡与协调方程所组成的非线性方程组进行求
∆(θ) = min(θ,2π−θ) (9)
解,获取滚动体当前动刚度以及接触状态,将当前时
则第 m 个滚子离基准轴最小角度为:
刻状态值重新代入方程组中,获取下一时刻状态,不
′
′
′
∆ m (θ (t)) = min(θ (t),2π−θ (t)) (10)
m m m
断迭代直至完成整个过程。
1.3 非线性弹簧模型 开始
本文基于赫兹接触理论建立等效非线性弹簧模 输入ω i 、K j 、θ Im 等已知量
型,并作以下假设:(1)忽略润滑油膜及热效应对接 输入给定内/外圈相对位移δ r
更
触形变的影响;(2)滚动体等距分布,仅发生纯滚动; 新 求解力平衡方程与协调方程
(3)内圈与转子视为刚性整体。其模型如图 3 所示。 与
δ r
根据刚度定义,可得由赫兹接触理论所等效而 θ m t+Δt 得到k m 、 δ m 、承载滚子个数
成的弹簧的动刚度为: 计算得出当前k t
3 1 结束
dQ j
k j = = K j δ 2 j (11)
dδ j 2 图 4 轴承动刚度求解流程图
对于单个滚动体,与内/外圈接触后等效弹簧间 Fig. 4 Flow chart for solving bearing dynamic stiffness