
Page 191 - 《振动工程学报》2025年第9期
P. 191
第 9 期 宋春生,等:控制信号在线辨识算法的振动主动控制研究 2121
被动隔振 离线辨识次级通道 在线辨识次级通道
−20
X: 49.83 X: 49.9 X: 49.87 100
Y: −44.37
−40 −50 Y: −45.94 Y: −25.5 X: 50
Y: −47.99
R(n) / dB −60 −60 49.5 50.0 50.5 相位 / (°) −250 Y: −157.7
X: 50
−80
−100 次级通道相频特性
突变后次级通道相频特性
−120
0 10 20 30 40 50 60 70 80 90 100 −600
0 25 50 75 100
f / Hz
频率 / Hz
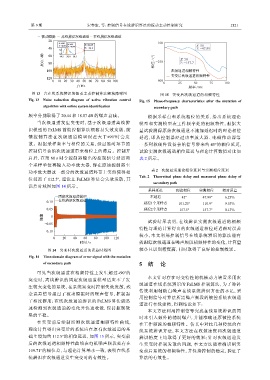
图 13 含在线系统辨识的振动主动控制算法频域降噪图 图 15 突变后次级通道的相频特性
Fig. 13 Noise reduction diagram of active vibration control
Fig. 15 Phase-frequency characteristics after the mutation of
algorithm with online system identification secondary path
频率分别取得了 20.44 和 18.87 dB 的噪声衰减。 根据采样点和系统相位的关系,给出系统理论
当次级通道发生突变时,基于次级通道离线辨 模型和实测模型在工作频率处的相频特性,根据大
识模型的 FxLMS 前馈控制算法很容易失效发散,前 量试验测得原始次级通道不施加延迟时的理论相位
馈 控 制 算 法 在 次 级 通 道 模 型 误 差 大 于±90°时 会 发 延迟,即从控制器经过功率放大器、电磁作动器等
散。根据采样频率与相位的关系,经过延时环节的 一系列软硬件设备会给信号带来约 45°的相位延迟,
控制信号会给次级通道带来相位上的滞后。控制开 试验实测次级通道相位延迟与理论计算数值对比如
启后,在第 60 s 时令控制器输出的控制信号延迟两 表 2 所示。
个采样单位再输入功率放大器,即在原始控制器至
表 2 次级通道理论相位延迟与实测相位延迟
功率放大器这一部分的次级通道环节上突然使得相
Tab. 2 Theoretical phase delay and measured phase delay of
位延迟了 112.5°,理论上 FxLMS 算法会失效发散,其
secondary path
误差时域图如图 14 所示。
采样延迟 理论相位 实测相位 相对误差
固定次级通道模型 不延迟 −45° −47.99° 6.23%
0.10 在线辨识次级通道 延迟1个采样点 −101.25° −110.9° 9.53%
0.05 延迟2个采样点 −157.5° −157.7° 0.13%
幅值 0
−0.05 试验结果表明,在线辨识实测次级通道的相频
特性与理论计算得出的次级通道相位延迟相对误差
−0.10
较小,本文利用控制信号在线系统辨识的算法能有
0 20 40 60 80 100 120
时间 / s 效跟踪次级通道在噪声频段相频特性的变化,计算量
图 14 突变时次级通道的误差时域图 较小且识别精度高,同时取得了良好的控制效果。
Fig. 14 Time-domain diagram of error signal with the mutation
of secondary path 5 结 论
可见当次级通道在相频特性上发生超过±90°的
本文针对存在时变特性的机械动力转置采用次
突变时,离线辨识的固定次级通道模型适应不了发
级通道在线系统辨识的 FxLMS 控制算法,为了弥补
生较大变化的系统,在系统突变时控制失效发散,残
传统利用辅助白噪声在线系统辨识方法的不足,采
余误差信号超过了被动隔振时的噪声信号,控制起
用控制信号对算法所需噪声频段的被控系统次级通
了相反作用;在线次级通道辨识的 FxLMS 算法能迅
道进行在线建模,得到结论如下:
速检测到次级通道的变化并快速收敛,保持控制效
本文方法利用控制信号完成在线系统辨识的同
果的平稳。
时未引入额外的辅助噪声,并能准确还原被控系统
在突变前后绘制所测次级通道相频特性曲线, 在工作频段的相频特性。仿真中对比几种传统的在
理论计算得出突变后的系统应在原有次级通道的基 线系统辨识方法,本文方法在收敛速度和次级通道
础上增加约 112.5°的相位延迟,如图 15 所示,突变前 辨识精度上均取得了更好的效果;针对次级通道发
后的次级通道相频特性曲线在电机噪声频段处存在 生突变时控制发散的问题,本文方法能准确识别突
109.71°的相位差,与理论计算基本一致,表明在线系 变前后系统的相频特性,并保持控制的稳定,验证了
统辨识在次级通道发生突变时的有效性。 算法的有效性。