
Page 188 - 《振动工程学报》2025年第9期
P. 188
2118 振 动 工 程 学 报 第 38 卷
的鲁棒性,在次级通道发生突变时难以保证控制的 完全收敛到 S(z),并实时更新给 FxLMS 算法中所需
稳定性。 的次级通道。在初级通道系统特性固定的情况下,
不仅能保证辨识过程输入输出信号的高度相关,也
2 控 制 信 号 在 线 辨 识 降低了系统参数整定难度。
根据指数平滑法定义误差信号的能量为:
2
FxLMS 算法依赖于一个能反映出被控系统在噪 P e (n) = λP e (n−1)+(1−λ)e (n) (16)
声频段幅频特性和相频特性的次级通道模型,其中 式中,λ 为指数平滑法中的加权系数,通常能说明当
次级通道幅频辨识误差可以通过调整控制器的更新 前数据和过去数据对预测值的影响权重。
步长使控制效果达到最佳,而相频辨识误差影响了 则控制器的迭代公式可表示为:
系统的收敛性和控制精度,当辨识出的次级通道模 W(n+1) = W(n)+2µ e e(n)X s (n) (17)
′
型在相频特性与真实系统在某频段上相差大于±90° 其中,步长 µ e (n)为:
时,控制将无法收敛甚至发散。常规的在线系统辨 µ e (n) = αP e (n)µ emax +[1−αP e (n)]µ emin (18)
n
识方法利用白噪声对次级通道在全频段上进行辨 式中,α 为指数平滑法中的加权系数;u ema 和 x u emi 分
识,而被控系统通常只会工作在单一或者少数几个 别为设定的最大和最小收敛步长因子。
频率区间,因此利用白噪声在线更新次级通道的方 此处通过变步长的方法调整控制器的收敛速
度,使迭代步长时刻处于较优位置,补偿了次级通道
法,不仅增加了辨识的时间,同时也难以达到理想的
辨识精度。本文利用控制器的输出信号 Wy(n)同时 在幅频上的辨识误差。本文所提方法可以根据控制
用作于控制过程和辨识过程,仅针对噪声频段进行 信号的频率成分辨识出次级通道在对应频率段的相
辨识,从而避免辅助噪声的引入,并实时更新次级通 频特性,当频率成分发生变化时,控制信号总能跟踪
道模型完成 FxLMS 算法的迭代。改进后的控制信 到噪声频段,因此在不注入辅助噪声的情况下,既能
完成对时变系统不同频段的在线辨识,又能降低控
号在线系统辨识算法框图如图 4 所示。
制系统在稳态时的控制误差,具有较强的实用性。
x (n) d (n) + e (n)
P(z) ∑
−
d' (n) + − 3 控 制 与 辨 识 仿 真
P ˆ (z) ∑
−
Wy(n)
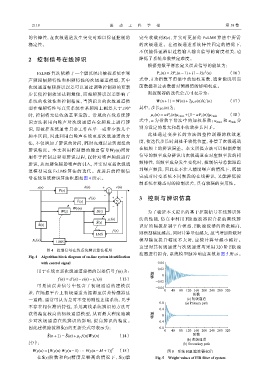
W(z) S (z) 为了验证本文提出的基于控制信号在线辨识算
y s '(n) 法的性能,仿真中利用 FIR 滤波器拟合提前离线辨
S ˆ (z)
S ˆ (z) 识好的隔振控制平台模型,FIR 滤波器的阶数越高,
f (n)
LMS 则模型精度越高,同时计算量也越大,故当增加阶数对
X s '(n) 模型精度提升幅度不大时,应使计算量越小越好。
LMS
这里对其初级通道与次级通道均采用 320 阶 FIR 滤
图 4 控制信号在线系统辨识算法框图
波器进行拟合,系统模型脉冲响应系数如图 5 所示。
Fig. 4 Algorithm block diagram of on-line system identification
with control signal 0.04
0.02
用于在线更新次级通道建模的误差信号 f(n)为:
′
′
f(n) = d (n)−e(n)−y s (n) (13) 幅值 0
−0.02
可见该误差信号中包含了初级通道的建模误 −0.04
差,在隔振平台上初级通道为振源至误差传感器这 0 40 80 120 160 200 240 280 320
阶数
一通路,通常可认为是时不变的刚性连接系统,几乎 (a) 初级通道
0.8 (a) Primary path
不存在相位滞后特性,采用离线系统辨识的方法可 0.4
获得精度较高的初级通道模型,从而最大程度地减 幅值 0
少对次级通道在线辨识的影响,提高辨识的精度。 −0.4
ˆ
因此建模滤波器 S(z)的更新公式可表示为: −0.8
0 40 80 120 160 200 240 280 320
ˆ
ˆ
S(n+1) = S(n)+µ f f(n)Wy(n) (14) 阶数
(b) 次级通道
其中: (b) Secondary path
Wy(n) = [Wy(n) Wy(n−1) ··· Wy(n− M +1)] T (15) 图 5 系统 FIR 滤波器权值
ˆ
ˆ
ˆ
在 S(z)阶 数 和 P(z)精 度 足 够 高 的 情 况 下 , S(z)能 Fig. 5 Weight values of FIR filter of system