
Page 190 - 《振动工程学报》2025年第9期
P. 190
2120 振 动 工 程 学 报 第 38 卷
的 0.8 倍,每隔 30 s 令次级通道相位滞后一个采样 正常次级通道 突变后的次级通道 辨识出的次级通道
0
点,仿真参考信号频率为 40 Hz,采样频率为 320 Hz,
−100
即每个采样点的延迟会带来 45°的相位滞后,将本文 X: 50
Y: −181.363
算法与采用离线辨识次级通道进行 120 s 的仿真对 相位 / (°) −200
比,误差时域图如图 9 所示。 −300 112.59°
X: 50
Y: −293.953
4 −400
经典FxLMS算法 0 20 40 60 80 100
本文算法
2 频率 / Hz
幅值 0 图 11 突变后次级通道的相频特性
Fig. 11 Phase-frequency characteristics after the mutation of
−2 secondary path
延迟45° 延迟90° 延迟135°
−4
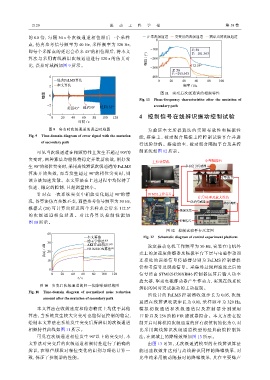
0 20 40 60 80 100 120 4 控 制 信 号 在 线 辨 识 振 动 控 制 试 验
时间 / s
图 9 突变时次级通道的误差时域图 为验证本文所提算法的实际有效性和隔振性
Fig. 9 Time-domain diagram of error signal with the mutation 能,搭建主、被动混合隔振主控控制试验平台并进
of secondary path
行试验分析。搭建的主、被动混合隔振平台及其控
可见当次级通道在相频特性上发生不超过 90°的 制系统如图 12 所示。
突变时,两种算法均能保持稳定并重新收敛,刚好发
上位计算机 小型隔振台
生 90°的相位突变时,采用离线辨识次级通道的 FxLMS 参考信号传感器
算法开始失效,而当发生超过 90°的相位突变时,则
功率放大
该方法加速发散。本文算法在上述过程中均保持了
快速、稳定的控制,且超调量较小。
针对在一次系统突变中相位变化超过 90°的情 STM32主控芯片
信号处理及放大设备
况,各算法仿真参数不变,调整参考信号频率为 50 Hz, 误差传感器 数据调理
根据式 (20) 可计算出延迟两个采样点会带来 112.5°
数据采集
的 次 级 通 道 相 位 延 迟 。 对 比 各 算 法 控 制 性 能 如
图 10 所示。 控制信号
图 12 控制试验平台示意图
40
本文算法 Fig. 12 Schematic diagram of control experiment platform
浦玉学算法 [15]
30 AKHTAR算法 [14] 设定振动电机工作频率为 50 Hz,安装在电机外
R(n) / dB 20 ERIKSSON算法 [4] 壳上的加速度传感器及隔振平台下层与电磁作动器
10 连接处的误差信号传感器分别为 FxLMS 控制器提
供参考信号及误差信号。采集经过调理滤波之后的
0
0 20 40 60 80 100 120 信号经由 STM32H750XBH6 控制器运算后输入功率
t / s
放大器,驱动电磁作动器产生作动力,实现在线系统
图 10 突变后次级通道的归一化降噪量时域图
辨识的同时完成振动的主动控制。
Fig. 10 Time-domain diagram of normalized noise reduction
所设计的 FxLMS 控制器收敛步长为 0.05,次级
amount after the mutation of secondary path
通道在线辨识收敛步长为 0.01,采样频率为 320 Hz,
本文算法在收敛速度和稳态精度上均优于其他 模 拟 初 级 通 道 和 次 级 通 道 以 及 控 制 器 分 别 采用
算法,当系统发生较大突变时也能保证控制的稳定, 17 阶以及 256 阶的 FIR 滤波器拟合。本文方法在控
绘制本文算法在系统发生突变后所辨识的次级通道 制开启时将模拟次级通道的所有权值初始化为 0,对
相频特性曲线如图 11 所示。 比采用离线辨识次级通道模型的经典前馈控制算
可见在次级通道相位发生 90°以上的突变时,本 法,在频域上的降噪效果如图 13 所示。
文算法对突变后的次级通道相频特性进行了精确的 由图 13 可知,无次级通道模型的在线辨识算法
辨识,在噪声频段对相位变化的识别与理论计算一 能迅速收敛并达到与离线辨识同样的降噪效果,对
致,保证了控制器的性能。 比单纯采用被动隔振时的降噪效果,其在主要噪声