
Page 189 - 《振动工程学报》2025年第9期
P. 189
第 9 期 宋春生,等:控制信号在线辨识算法的振动主动控制研究 2119
为了验证不同算法的辨识与控制效果,通常用 次级通道模型 浦玉学算法 [15]
本文算法 AKHTAR算法 [14] ERIKSSON算法 [4]
于评价算法减振性能的一个关键指标为系统的归一
化降噪量,其标准定义如下: −100
X: 50
n ∑ −150
Y: −181.103
2
e (k)
−170
相位 / (°)
−200
k=1
R(n) = −10lg n (19) −180
∑
−250
2
−190
d (k)
−300 49.5 50 50.5
k=1
R(n)值越大,说明系统的降噪性能越好。 0 20 40 60 80 100
频率 / Hz
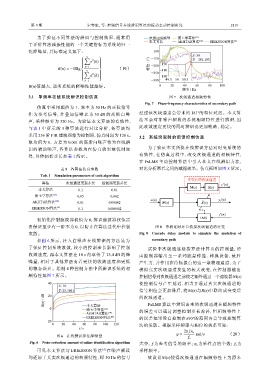
3.1 单频率在线系统辨识控制仿真 图 7 次级通道相频特性
Fig. 7 Phase-frequency characteristics of secondary path
仿真中采用幅值为 1、频率为 50 Hz 的正弦信号
作为参考信号,并叠加信噪比为 30 dB 的高斯白噪 经过该次级通道会带来约 181°的相位延迟。本文算
声,采样频率为 320 Hz。为验证本文算法的有效性, 法不会对非噪声频段的系统相频特性进行辨识,因
与表 1 中所示的 3 种算法进行对比分析,各算法均 此收敛速度更快的同时辨识也更加精确、稳定。
采用 256 阶 FIR 滤波器作为控制器,仿真时间为 120 s。 3.2 系统突变时的前馈控制仿真
取均值为 0、方差为 0.001 的高斯白噪声作为在线辨
识的辅助噪声,各算法参数均在仿真效果最优时取 为了验证本文所提在线辨识方法对时变系统的
得,具体初始步长如表 1 所示。 有效性,在仿真过程中,改变次级通道的相频特性,
在 FxLMS 主动控制算法中引入本文在线辨识方法,
表 1 各算法仿真参数 对比分析两者之间的减振效果。仿真框图如图 8 所示。
Tab. 1 Simulation parameters of each algorithm
突变后的次级通道
算法 次级通道更新步长 控制器更新步长 y' (n)
M (z) S (z)
本文算法 0.1 0.01
浦玉学算法 [15] 0.05 0.002
x (n) y s '(n)
AKHTAR算法 [14] 0.01 0.00002 W (z) S ˆ (z)
ERIKSSON算法 [4] 0.1 0.000002
f (n)
初始化控制滤波器权值为 0,辨识滤波器权值需 LMS
要保证至少有一阶不为 0,以防止在算法迭代中控制 图 8 串联延时环节模拟次级通道的突变
发散。 Fig. 8 Cascade delay module to simulate the mutation of
如图 6 所示,注入白噪声在线辨识的方法是为 secondary path
了保证控制系统收敛,较小的控制步长影响了控制 试验中次级通道是指算法计算出的控制量,经
收敛速度,而本文算法在 10 s 内取得了 25.4 dB 的降 由控制器输出至一系列能量传递、转换设备,最后
噪量,相对于其他算法有着更快的收敛速度和更低 产生力,并作用在待隔振点的这一条物理通道,为了
的稳态误差。绘制 4 种控制方法中所辨识系统的相 模拟真实次级通道发生的较大改变,在控制器输出
频特性如图 7 所示。 控制信号到次级通道之前使之额外通过一个滤波器 M(z)
40 使控制信号产生延迟,相当于通过真实次级通道的
X: 10
Y: 25.3661 信号相位会更加滞后,将 M(z)与 S(z)串联组成突变后
R(n) / dB 20 的次级通道。
算法中辨识出来的次级通道在幅频特性
FxLMS
0 本文算法 [15]
浦玉学算法
AKHTAR算法 [14] 的误差可以通过调整控制步长弥补,但相频特性上
ERIKSSON算法 [4] 的误差如果没有控制在±90°的范围内会导致控制算
−20
0 20 40 60 80 100 120 法的发散。根据采样频率与相位的关系可知:
t / s
2πfn c
φ = rad/s (20)
图 6 在线辨识算法降噪量
f s
Fig. 6 Noise reduction amount of online identification algorithm 式中, f 为参考信号的频率; n c 为采样点的个数; 为
f s
可见本文算法与 ERIKSSON 算法 [4] 在噪声频段 采样频率。
均还原了真实次级通道的相频特性,即 50 Hz 的信号 故设计 M(z)使得次级通道在幅频特性上为原来