
Page 52 - 《振动工程学报》2025年第8期
P. 52
1692 振 动 工 程 学 报 第 38 卷
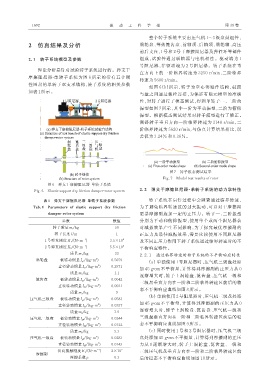
整个转子系统主要由压气机 1~3 级盘鼓组件、
2 仿真结果及分析 涡轮盘、等效篦齿盘、前轴颈、后轴颈、涡轮轴、高压
前后支座、1 号和 2 号干摩擦阻尼器及弹性环等部件
2. 1 转子系统模型及参数 组成,试验件通过联轴器与电机相连。驱动端为 1
号阻尼器,非驱动端为 2 号阻尼器。转子系统在垂
理论分析是针对试验转子系统进行的。弹支干
直方向上的一阶临界转速为 3250 r/min,二阶临界
摩擦阻尼器‑单转子系统为图 6 所示的带有五个刚
转速为 5600 r/min。
性圆盘的单转子双支承结构,转子系统的相关参数
如图 6(b)所示,转子为空心薄壁件结构,鼓筒
如表 1 所示。
与盘之间通过螺栓连接,为保证有限元模型的准确
性,对转子进行了模态测试,得到单转子一、二阶的
振型如图 7 所示,其中一阶为平动振型,二阶为俯仰
振型。根据模态测试结果对转子模型进行了修正。
测得转子垂直方向一阶临界转速为 3148 r/min,二
阶临界转速为 5620 r/min,与仿真计算结果相比,误
差仅为 3.24% 和 0.36%。
图 7 转子模态测试结果
Fig. 7 Modal test results of rotor
图 6 弹支干摩擦阻尼器-单转子系统
2. 2 弹支干摩擦阻尼器⁃单转子系统的动力学特性
Fig. 6 Elastic support dry friction damper‑rotor system
表 1 弹支干摩擦阻尼器-单转子系统参数 转子系统在启停过程中会频繁通过临界转速,
Tab. 1 Parameters of elastic support dry friction 为了避免临界转速区的过大振动,可以对干摩擦阻
damper-rotor system 尼器摩擦副施加一定的正压力。转子一、二阶振型
参数 数值 分别为平动和俯仰振型,使用单个或两个阻尼器会
转子质量 m r /kg 59 对减振效果产生不同影响,为了探究最优摩擦副的
转子长度 l/m 1 正压力及最佳减振效果,需要比较使用不同阻尼器
-1 6
1 号弹支刚度 K 1 /(N·m ) 3.5×10 及不同正压力作用下转子系统通过临界转速时的不
-1
2 号弹支刚度 K 2 /(N·m ) 5.5×10 6 平衡响应特性。
质量 m 1 /kg 33 2. 2. 1 通过临界转速时转子系统的不平衡响应特性
涡轮盘 极转动惯量 I p1 /(kg·m ) 0.5659
2
(a) 单独使用 1 号阻尼器时,压气机三级盘处添
2
直径转动惯量 I d1 /(kg·m ) 0.2871
加 45 g·cm 不平衡量,计算得到摩擦副的正压力从 0
质量 m 2 /kg 1.1
逐渐增大时,转子上涡轮盘、篦齿盘、压气机一级和
篦齿盘 极转动惯量 I p2 /(kg·m ) 0.0042
2
三级盘垂直方向在一阶和二阶临界转速区前后的稳
2
直径转动惯量 I d2 /(kg·m ) 0.0021
态不平衡响应曲线如图 8 所示。
质量 m 3 /kg 9
(b) 单独使用 2 号阻尼器时,压气机三级盘处添
2
压气机三级盘 极转动惯量 I p3 /(kg·m ) 0.0583
加 45 g·cm 不平衡量,计算得到摩擦副的正压力从 0
2
直径转动惯量 I d3 /(kg·m ) 0.0297
逐渐增大时,转子上涡轮盘、篦齿盘、压气机一级和
质量 m 4 /kg 3.9
2
压气机二级盘 极转动惯量 I p4 /(kg·m ) 0.0244 三级盘垂直方向在一阶和二阶临界转速区前后的稳
2
直径转动惯量 I d4 /(kg·m ) 0.0122 态不平衡响应曲线如图 9 所示。
质量 m 5 /kg 5.3 (c) 同时使用 1 号和 2 号阻尼器时,压气机三级
2
压气机一级盘 极转动惯量 I p5 /(kg·m ) 0.0283 盘处添加 45 g·cm 不平衡量,计算得到摩擦副的正压
2
直径转动惯量 I d5 /(kg·m ) 0.0143 力从 0 逐渐增大时,转子上涡轮盘、篦齿盘、一级和
-1
切向接触刚度 K t /(N·m ) 2×10 7 三级压气机盘垂直方向在一阶和二阶临界转速区前
摩擦副
摩擦系数 μ 0.3 后的稳态不平衡响应曲线如图 10 所示。