
Page 111 - 《振动工程学报》2025年第8期
P. 111
第 8 期 郭俊超,等: 多尺度改进差分滤波的旋转机械故障特征提取研究 1751
加权组合而成,其通过基于 Teager 能量峭度的加权
系 数 与 不 同 SE 尺 度 下 的 ACDIF 信 号 相 乘 得 到
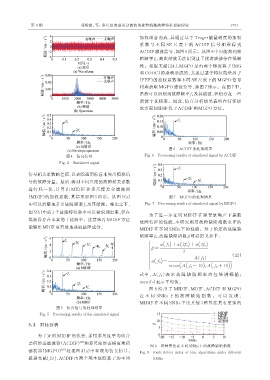
ACDIF 滤波信号,如图 6 所示。从图 6 中只能找到故
障频率 f o,高次谐波无法识别且干扰谐波掺杂在低频
段。根据文献[24],MGPO 是由两个梯度算子(MG
和 COOC)的乘积形成的,其通过基于特征能量因子
(FEF)的加权系数和不同 SE 尺度下的 MGPO 信号
相乘获取 MGPO 滤波信号,如图 7 所示。在图 7 中,
虽然可以识别到故障频率 f o 及其谐波,但仍存在一些
谐波干扰频率。因此,仿真分析结果表明在特征提
取方面 MIDIF 优于 ACDIF 和 MGPO 方法。
图 6 ACDIF 的处理结果
图 4 仿真信号 Fig. 6 Processing results of simulated signal by ACDIF
Fig. 4 Simulated signal
信号相关系数的差值,以去除通用信息来突出模拟信
号的故障分量。最后,将对不同尺度的故障相关系数
进 行 归 一 化 ,计 算 出 MIDIF 和 多 尺 度 差 分 滤 波 器
(MDIF)的加权系数,其结果如图 5 所示。从图 5(a) 图 7 MGPO 的处理结果
中可以清楚地看出故障频率 f o 及其谐波。相比之下, Fig. 7 Processing results of simulated signal by MGPO
图 5(b)中前 3 个故障特征频率可以被识别出来,但在
为了进一步证明 MIDIF 在强背景噪声下提取
低频段存在丰富的干扰频率。这意味着 MIDIF 方法
故障特征的性能,本研究利用故障缺陷指数来评估
能够比 MDIF 更有效地获取故障成分。 MIDIF 在不同 SNRs 下的性能。对于给定的故障缺
陷频率 f 0,故障缺陷指数 β 可以定义如下:
ì α( ) + α( ) + α( )
ï ï
2f 0
3f 0
f 0
ï β =
ï
ï ï 3
í (22)
ï ï A( f 0 )
ï ï α( ) = ) ) )
f 0
ï ï mean( A( f 0 - 10 ,A( f 0 + 10
î
式中 , A( f 0 ) 表 示 故 障 缺 陷 频 率 的 包 络 谱 幅 值;
mean(⋅)表示平均值。
图 8 给 出 了 MIDIF、MDIF、ACDIF 和 MGPO
在 不 同 SNRs 下 的 故 障 缺 陷 指 数 。 可 以 发 现 ,
MIDIF 在不同 SNRs 下比其他 3 种算法具有更强的
图 5 仿真信号的处理结果
Fig. 5 Processing results of the simulated signal
3. 2 对比分析
为了证明 MIDIF 的优势,采用多尺度平均组合
[23]
差值形态滤波器(ACDIF) 和多尺度形态梯度乘积
图 8 四种算法在不同 SNRs 下的故障缺陷指数
[24]
滤波器(MGPO) 处理图 4(a)中呈现的仿真信号。 Fig. 8 Fault defect index of four algorithms under different
根据文献[23],ACDIF 由两个基本级联算子的平均 SNRs