
Page 109 - 《振动工程学报》2025年第8期
P. 109
第 8 期 郭俊超,等: 多尺度改进差分滤波的旋转机械故障特征提取研究 1749
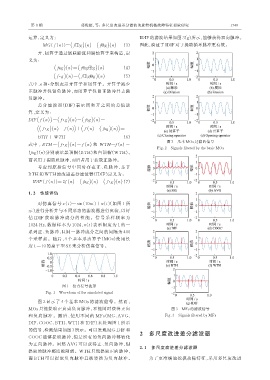
运算,定义为: IDIF 的滤波结果如图 3(g)所示,能够获得双向脉冲。
MG ( f ( n ) )=( f⊕g)(n) -( fΘg)(n) (3) 因此,验证了 IDIF 对于提取循环脉冲更有效。
开、闭算子通过级联膨胀和腐蚀算子来构造,定
义为:
( fοg)(n) =( fΘg⊕g)(n) (4)
( f ⋅ g)(n) =( f⊕gΘg)(n) (5)
式中, ο 和 ⋅分别表示开算子和闭算子。开算子减少
正脉冲并保留负脉冲,而闭算子保留正脉冲并去除
负脉冲。
差 分 滤 波 器(DIF)表 示 闭 和 开 之 间 的 差 值 运
算,定义为:
DIF( f (n)) =( f ⋅ g)(n) -( fοg)(n) =
)
(( f ⋅ g ( ) n - f ( ) n ) +( f ( ) n -( )( ) n ) =
fοg
BTH + WTH (6)
图 2 基本 MOs 过滤的信号
式中 ,BTH =( f ⋅ g)(n) - f (n) 和 WTH=f(n)-
Fig. 2 Signals filtered by the basic MOs
(fοg)(n)分别表示黑顶帽(BTH)和白顶帽(WTH)。
前者用于提取负脉冲,而后者用于获取正脉冲。
考虑到原始信号中同时存在正、负脉冲,基于
BTH 和 WTH 的改进差分滤波器(IDIF)定义为:
IDIF ( f ( n ) )= 2f (n) -( fοg)(n) -( f ⋅ g)(n) (7)
1. 2 性能评估
对仿真信号 x ( t )= sin (10πt )+ n( t ) (如图 1 所
示)进行分析并与不同形态的滤波器进行比较,以评
估 IDIF 获 取 脉 冲 成 分 的 性 能 。 信 号 采 样 频 率 为
1024 Hz,数据样本为 1024, n( t ) 表示幅度为 1 的一
系列正、负脉冲,且同一脉冲成分之间的间隔为 400
个采样点。随后,4 个基本形态算子(MOs)使用长
度 L=10 的扁平型 SE 来分析仿真信号。
图 1 仿真信号波形
Fig. 1 Waveform of the simulated signal
图 2 显示了 4 个基本 MOs 的滤波信号。然而,
MOs 只能提取正向或负向脉冲,不能同时获得正向 图 3 MFs 的滤波信号
和负向脉冲。随后 ,使用不同的 MFs(MG、AVG、 Fig. 3 Signals filtered by MFs
DIF、COOC、BTH、WTH 和 IDIF)来处理图 1 所示
的信号,检测结果如图 3 所示。可以发现 MG、DIF 和
2 多尺度改进差分滤波器
COOC 能够提取脉冲,但是所有的负向脉冲都转化
为正向脉冲。虽然 AVG 可以获得正、负向脉冲,但
2. 1 多尺度改进差分滤波器
提取的脉冲幅度被削弱。WTH 只能提取正向脉冲,
而 BTH 可以提取负向脉冲且被转换为负向脉冲。 为了更准确地挖掘故障特征,采用多尺度改进