
Page 113 - 《振动工程学报》2025年第8期
P. 113
第 8 期 郭俊超,等: 多尺度改进差分滤波的旋转机械故障特征提取研究 1753
为了提取故障频率 f o 及其谐波,利用 MIDIF 分 轮箱的尺寸参数和故障频率如表 2 所示。
析滚动轴承故障信号。首先,故障信号通过 MIDIF
分解为一系列 MIDIFs,并计算了 MIDIF 与故障信
号之间的相关系数 u ε,以及 MIDIF 与正常方位信号
之 间 的 相 关 系 数 φ ε。 然 后 ,通 过 u ε 和 φ ε 之 间 的 差
值 计 算 故 障 相 关 系 数 ,以 突 出 滚 动 轴 承 的 故 障 成
分。最后,通过对不同尺度的故障相关系数进行归
一 化 ,计 算 出 MIDIF 的 加 权 系 数 ,其 分 析 结 果 如
图 14 所示。在图 14 中能够看到轴承外圈故障 f o 的 图 17 行星齿轮箱试验台
Fig. 17 The planetary gearbox test rig
谱线。
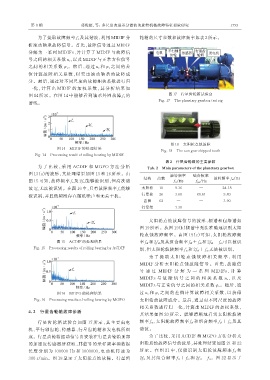
图 18 太阳轮点蚀故障
图 14 MIDIF 的处理结果
Fig. 18 The sun gear chipped tooth
Fig. 14 Processing result of rolling bearing by MIDIF
表 2 行星齿轮箱的主要参数
为 了 比 较 ,采 用 ACDIF 和 MGPO 方 法 分 析 Tab. 2 Main parameters of the planetary gearbox
图 13(a)的波形,其处理结果如图 15 和 16 所示。由 旋转频率 啮合频率
结构 齿数 故障频率 f sf /Hz
图 15 可知,故障频率 f o 及 2f o 能够被识别,但高次谐 f rs /Hz f pm /Hz
波 3f o 无法被识别。在图 16 中,只有故障频率 f o 能够 太阳轮 10 9.36 — 24.18
被识别,并且低频段存在随机噪声和无关干扰。 行星轮 26 3.60 80.61 9.80
齿圈 62 — — 3.90
行星架 — 1.30 — —
太阳轮点蚀故障信号的波形、频谱和包络谱如
图 19 所示。从图 19(b)频谱中无法准确地识别太阳
轮点蚀故障频率。由图 19(c)可知,太阳轮故障频
图 15 ACDIF 的处理结果 率 f sf 和 2f sf 及其组合频率 f sf ± f rs 和 2f sf - f rs 可以被识
Fig. 15 Processing results of rolling bearing by ACDIF 别,但太阳轮旋转频率 f rs 和 2f sf + f rs 无法被识别。
为 了 提 取 太 阳 轮 点 蚀 故 障 相 关 频 率 ,利 用
MIDIF 分 析 太 阳 轮 点 蚀 故 障 信 号 。 首 先 ,故 障 信
号 通 过 MIDIF 分 解 为 一 系 列 MIDIFs,计 算
MIDIFs 与 故 障 信 号 之 间 的 相 关 系 数 u ε,以 及
MIDIFs 与正常信号之间的相关系数 φ ε。随后,通
图 16 MGPO 的处理结果 过 u ε 和 φ ε 之 间 的 差 值 计 算 故 障 相 关 系 数 ,以 获 得
Fig. 16 Processing results of rolling bearing by MGPO 太阳轮的故障成分。最后,通过对不同尺度的故障
相关系数进行归一化,计算出 MIDIF 的加权系数,
4. 2 行星齿轮箱故障诊断
其结果如图 20 所示。能够清晰地看到太阳轮旋转
行 星 齿 轮 箱 试 验 台 如 图 17 所 示 ,其 主 要 由 电 频率 f rs、太阳轮故障频率 f sf 和组合频率 f sf + f rs 及其
机、平行轴齿轮、传感器、行星齿轮箱和发电机所组 谐波。
成。行星齿轮箱振动信号由安装在行星齿轮箱顶部 为了比较,采用 ACDIF 和 MGPO 方法分析太
的加速度传感器所获取,其信号的采样频率和数据 阳轮点蚀故障信号的波形,其处理结果如图 21 和 22
长 度 分 别 为 100000 Hz 和 3000000,电 动 机 转 速 为 所 示 。 在 图 21 中 ,仅 能 识 别 太 阳 轮 故 障 频 率 f sf 和
300 r/min。图 18 显示了太阳轮点蚀故障。行星齿 2f st 及 其 组 合 频 率 f sf + f rs 和 2f sf - f rs。 图 22 显 示 了