
Page 26 - 卫星导航2021年第1-2合期
P. 26
El‑Sheimy and Li Satell Navig (2021) 2:7 Page 16 of 23
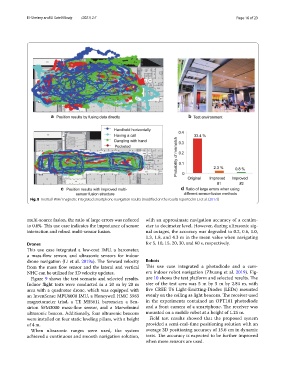
Fig. 8 Inertial/ WiFi/ magnetic integrated smartphone navigation results (modifed on the results reported in Li et al. (2017))
multi-source fusion, the ratio of large errors was reduced with an approximate navigation accuracy of a centim-
to 0.8%. Tis use case indicates the importance of sensor eter to decimeter level. However, during ultrasonic sig-
interaction and robust multi-sensor fusion. nal outages, the accuracy was degraded to 0.2, 0.6, 1.0,
1.3, 1.8, and 4.3 m in the mean value when navigating
Drones for 5, 10, 15, 20, 30, and 60 s, respectively.
Tis use case integrated a low-cost IMU, a barometer,
a mass-fow sensor, and ultrasonic sensors for indoor
drone navigation (Li et al. 2019a). Te forward velocity Robots
from the mass fow sensor and the lateral and vertical Tis use case integrated a photodiode and a cam-
NHC can be utilized for 3D velocity updates. era indoor robot navigation (Zhuang et al. 2019). Fig-
Figure 9 shows the test scenario and selected results. ure 10 shows the test platform and selected results. Te
Indoor fight tests were conducted in a 20 m by 20 m size of the test area was 5 m by 5 m by 2.84 m, with
area with a quadrotor drone, which was equipped with fve CREE T6 Light-Emitting-Diodes (LEDs) mounted
an InvenSense MPU6000 IMU, a Honeywell HMC 5983 evenly on the ceiling as light beacons. Te receiver used
magnetometer triad, a TE MS5611 barometer, a Sen- in the experiments contained an OPT101 photodiode
sirion SFM3000 mass-fow sensor, and a Marvelmind and a front camera of a smartphone. Te receiver was
ultrasonic beacon. Additionally, four ultrasonic beacons mounted on a mobile robot at a height of 1.25 m.
were installed on four static leveling pillars, with a height Field test results showed that the proposed system
of 4 m. provided a semi-real-time positioning solution with an
When ultrasonic ranges were used, the system average 3D positioning accuracy of 15.6 cm in dynamic
achieved a continuous and smooth navigation solution, tests. Te accuracy is expected to be further improved
when more sensors are used.