
Page 154 - 《武汉大学学报(信息科学版)》2025年第10期
P. 154
第 50 卷第 10 期 郭庆胜等:使用正对投影的建筑物群毗邻化新算法 2089
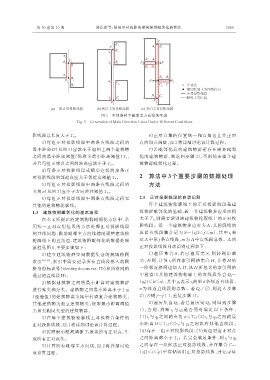
图 5 不同条件下毗邻主方向线的生成
Fig. 5 Generation of Main Direction Lines Under Different Conditions
影线段总长度大于 T 2。 6)正对点集的位置统一和直角边上非正对
3)每组正对投影线段中两条直线段之间的 点的顶点调整,§2.3 将详细讨论该计算过程。
最小距离 D(见图 3)应该小于地图上两个建筑物 7)若毗邻化后的建筑物群还存在需要毗邻
之间的最小距离阈值(简称为最小距离阈值)T 3, 化的建筑物群,则返回步骤 3);否则结束整个建
并且每组正对点之间的距离应该小于 T 3。 筑物群毗邻化过程。
4)每条正对投影线段或顺序连接的多条正
对投影线段的邻近度应大于邻近度阈值 T 4。 2 算法中 3 个重要步骤的数据处理
5)每组正对投影线段中两条直线段之间的 方法
夹角 α(见图 3)应小于方向差异阈值 T 5。
6)每组正对投影线段中两条直线段之间无 2.1 正对投影线段的自动识别
其他的建筑物轮廓线。 每个建筑物轮廓线上的正对投影线段是建
1.3 建筑物群毗邻化的基本流程 筑物群毗邻化的基础,若一个建筑物多边形面积
在本文所提出的建筑物群毗邻化方法中,采 大于 T 1,则需要识别该建筑物轮廓线上的正对投
用统一正对点集位置的方法处理正对投影线段 影线段。设一个建筑物多边形为 A,其轮廓线的
的共线问题,借助毗邻主方向线辅助调整建筑物 原始直线段集合记为 S={s j|1≤j≤m},其中 s j 表
轮廓线上的直角边,建筑物群毗邻化的数据处理 示 A 中第 j 条直线段,m 为 A 中直线段总数。A 的
流程见图 6,主要步骤如下: 正对投影线段自动识别过程如下:
1)建立建筑物群空间数据集合的规则格网 1)遍 历 集 合 S,若 已 遍 历 完 S,则 转 到 步 骤
索引 [18-19] ,索引中需要记录所有直线段落入的网 3);否则,计算 s j 所在索引网格集合 H,并将 H 的
格身份标识号(identity document,ID)和所有网格 一阶邻近格网也加入 H,从 H 所包含的索引网格
通过的直线段 ID。 中检索出其他建筑物轮廓上的直线段集合 Q j=
2)依据建筑物之间的最小距离对建筑物群 {q k|1≤k≤n},其中 q k 表示 s j 的第 k 条邻近直线段,
进行聚类和分类。建筑物之间最小距离小于 1 m n 为邻近直线段的总数。若 Q j≠∅,则进入步骤
(经验值)的建筑物群为城中村或复合建筑物类, 2);否则 j=j+1,重复步骤 1)。
其他建筑物为独立建筑物类;按照最小距离阈值 2)遍历集合 Q j,若已遍历完 Q j,则回到步骤
T 3 聚类相同类型的建筑物群。 1),否 则 ,判 断 s j 与 q k 是 否 同 时 满 足 以 下 条 件 :
3)在每个建筑物轮廓线上寻找符合条件的 (1)s j 与 q k 之间的夹角 α≤T 5;(2)s j 与 q k 之间的最
正对投影线段,§2.1 将详细讨论该计算过程。 小 距 离 D≤T 3;(3)s j 与 q k 之 间 没 有 其 他 直 线 段 ;
4)按照最小距离阈值 T 3 聚类所有正对点,生 (4)存在一组正对投影线段;(5)两组对应正对点
成所有正对点集。 之间距离都小于 T 3。若完全满足条件,则 s j 与 q k
5)计算所有毗邻主方向线,§2.2 将详细讨论 之间存在一组候选正对投影线段,并在集合 C=
该计算过程。 {c i|1≤i≤p}中存储该组正对投影线段,并记录该