
Page 61 - 《武汉大学学报(信息科学版)》2025年第9期
P. 61
第 50 卷第 9 期 魏浩翰等:基于熵值法轨迹聚类多特征参数融合的 GNSS-IR 土壤湿度反演方法 1789
表 5 多 GNSS 系统组合方案的反演精度对比
Table 5 Comparison of Inversion Accuracies of Different
GNSS System Combination Schemes
RMSE MAE
方案 GNSS 组合 相关系数
3.
3.
/(cm cm −3 ) /(cm cm −3 )
1 G+C 0.930 5 0.016 9 0.011 6
2 G+R 0.953 1 0.013 7 0.010 8
3 R+E 0.953 8 0.013 2 0.010 5
4 C+R 0.955 7 0.013 9 0.010 6
5 C+E 0.959 2 0.012 2 0.010 2
6 R+E 0.961 3 0.011 8 0.009 1
7 G+C+R 0.955 8 0.013 0 0.010 8
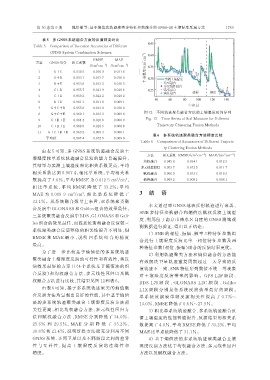
图 12 不同轨迹聚类融合方法的土壤湿度时间序列
8 G+C+E 0.960 1 0.012 2 0.009 6
Fig. 12 Time Series of Soil Moisture for Different
9 G+R+E 0.964 4 0.010 8 0.008 9
10 C+R+E 0.968 9 0.010 5 0.008 8 Trajectory Clustering Fusion Methods
11 G+C+R+E 0.969 2 0.009 3 0.008 1
表 6 多系统轨迹聚类融合方法精度比较
平均值 0.967 4 0.012 5 0.009 9
Table 6 Comparison of Accuracies of Different Trajecto⁃
ry Clustering Fusion Methods
由表 5 可知,多 GNSS 系统轨迹融合反演土
方法 相关系数 RMSE/(cm·cm −3 ) MAE/(cm·cm −3 )
3
3
壤湿度较单系统轨迹融合反演的能力普遍提升,
均权融合 0.945 8 0.014 1 0.012 5
其结果与实测土壤湿度相比相关系数更高,平均
多元线性回归 0.953 7 0.012 5 0.011 7
相关系数达到 0.967 4,相比单系统,平均相关系 赋权融合 0.966 0 0.013 2 0.010 3
数提高了 4.0%;平均 RMSE 为 0.012 5 cm /cm , 熵值融合 0.969 2 0.009 3 0.008 1
3
3
相 比 单 系 统 ,平 均 RMSE 降 低 了 33.2%;平 均
MAE 为 0.009 9 cm /cm ,相 比 单 系 统 降 低 了 3 结 语
3
3
31.1%。从系统融合数量上来看,双系统聚类融
本文通过对 GNSS 地表反射轨迹进行聚类、
合反演中 GLONASS 和 Galileo 组合的效果最佳,
SNR 多特征参数融合和熵值法赋权反演土壤湿
三系统聚类融合反演中 BDS、GLONASS 和 Gali⁃
度,利用位于南京市溧水区自建的 GNSS 测站观
leo 组合的效果最佳,而四系统聚类融合反演较三
测数据进行验证,得出以下结论:
系统聚类融合反演整体的相关性提升不明显,但
1) SNR 的相位、振幅、频率 3 种特征参数组
RMSE 和 MAE 最 小 ,说 明 四 系 统 组 合 的 精 度
合进行土壤湿度反演比单一相位特征参数及两
最高。
种特征参数(相位、振幅)组合的反演结果更优。
为了进一步比较基于熵值法的多系统轨迹
2) 利用轨迹聚类方法和熵值融合的方法能
聚类融合土壤湿度反演的可行性和有效性,将反
有效解决卫星轨迹重复周期超过一天导致的反
演效果最好的方案 11(4 个系统基于熵值法的组
演轨迹不一致、SNR 特征序列数值不统一等现象
合反演)和均权融合方法、多元线性回归以及赋
对 土 壤 湿 度 反 演 带 来 的 影 响 。 GPS L2P 频 段 、
权融合方法进行比较,其结果见图 12 和表 6。
BDS L7I 频 段 、GLONASS L2C 频 段 、Galileo
由表 6 可知,基于多系统轨迹聚类的熵值融 L1X 频 段 分 别 是 各 系 统 反 演 效 果 最 好 的 频 段 。
合反演方法均呈现出良好的性能,其中基于熵值
单 系 统 反 演 较 单 频 反 演 相 关 性 提 高 了 0.7%~
法的多系统轨迹聚类融合土壤湿度反演方法相 13.0%,RMSE 降低了 0.6%~27.9%。
关性更高,相比均权融合方法、多元线性回归方 3) 相比单系统轨迹融合,多系统轨迹融合反
法 和 赋 权 融 合 方 法 ,RMSE 分 别 降 低 了 34.0%、 演土壤湿度的性能普遍提升,反演结果的相关系
25.6% 和 29.5%,MAE 分 别 降 低 了 35.2%、 数提高了 4.0%,平均 RMSE 降低了 33.2%,平均
30.8% 和 21.4%,说明所提方法能充分利用不同 MAE 比单系统降低了 31.1%。
GNSS 系统、不同卫星以及不同频段之间的差异 4) 基于熵值法的多系统轨迹聚类融合土壤
性 与 互 补 性 ,提 高 土 壤 湿 度 反 演 的 连 续 性 和 湿度反演方法优于均权融合方法、多元线性回归
精度。 方法以及赋权融合方法。