
Page 59 - 《武汉大学学报(信息科学版)》2025年第9期
P. 59
第 50 卷第 9 期 魏浩翰等:基于熵值法轨迹聚类多特征参数融合的 GNSS-IR 土壤湿度反演方法 1787
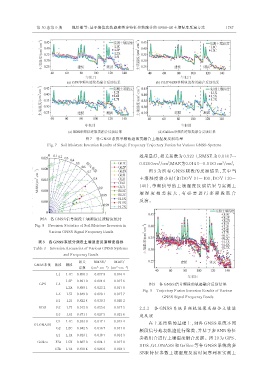
图 7 各 GNSS 系统单频轨迹聚类融合土壤湿度反演结果
Fig. 7 Soil Moisture Inversion Results of Single Frequency Trajectory Fusion for Various GNSS Systems
效果最好,相关系数为 0.923 1,RMSE 为 0.018 7~
3
0.026 0 cm /cm ,MAE为0.014 3~0.018 3 cm /cm 。
3
3
3
图 9 为所有 GNSS 频段的反演结果,其中当
土壤湿度较小时(如 DOY 91−100、DOY 130−
140),单 频 信 号 的 土 壤 湿 度 反 演 结 果 与 实 测 土
壤 湿 度 相 差 较 大 ,有 必 要 进 行 多 频 段 联 合
反演。
图 8 各 GNSS 信号频段土壤湿度反演精度统计
Fig. 8 Precision Statistics of Soil Moisture Inversion in
Various GNSS Signal Frequency Bands
表 3 各 GNSS 系统分频段土壤湿度反演精度指标
Table 3 Inversion Accuracies of Various GNSS Systems
and Frequency Bands
相关 RMSE/ MAE/
GNSS 系统 波段 频段
系数 (cm·cm −3 ) (cm·cm −3 )
3
3
L1 L1C 0.858 3 0.027 8 0.016 4
L2P 0.891 0 0.024 6 0.017 6
GPS L2 图 9 各 GNSS 信号频段的轨迹融合反演结果
L2X 0.889 1 0.023 2 0.017 0
Fig. 9 Trajectory Fusion Inversion Results of Various
L5 L5I 0.849 8 0.028 1 0.017 7
GNSS Signal Frequency Bands
B1 L2I 0.822 4 0.030 3 0.020 2
BDS B2 L7I 0.912 0 0.025 6 0.017 5 2.2.3 各 GNSS 系统多频轨迹聚类融合土壤湿
B3 L6I 0.871 1 0.027 5 0.021 6 度反演
G1 L1C 0.933 0 0.017 1 0.012 4 在上述结果的基础上,对各 GNSS 系统不同
GLONASS
G2 L2C 0.942 5 0.016 7 0.011 0
频段信号地表轨迹进行聚类,并基于多 SNR 特征
E1 L1X 0.923 1 0.018 7 0.014 3
参数组合进行土壤湿度融合反演。图 10 为 GPS、
Galileo E5a L5X 0.887 8 0.024 1 0.017 0
BDS、GLONASS 和 Galileo 等各 GNSS 系统的多
E5b L7X 0.878 4 0.026 0 0.018 3
SNR 特征参数土壤湿度反演时间序列和实测土