
Page 60 - 《武汉大学学报(信息科学版)》2025年第9期
P. 60
1788 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 9 月
壤湿度时间序列,其差值时间序列如图 11 所示, 而,在土壤湿度显著变化时(如 DOY 118),各系
表 4 为各系统反演结果的精度指标。 统对土壤湿度变化的响应能力不同,可能产生较
由图 10、图 11 和表 4 可知,各 GNSS 系统多 大的随机误差。因此,有必要联合多 GNSS 系统
频段轨迹融合反演结果较单频轨迹融合反演结 多频段进行轨迹融合反演土壤湿度。
果更优。与表 3 联合分析可知,GPS 系统多频反
演结果较其最佳频段 L2P 反演结果的相关性提
高 0.8%,RMSE 降 低 15.4%,MAE 降 低 7.4%;
BDS 系统多频反演结果较其最佳频段 L7I 相关性
提高 1.9%,RMSE 降低 20.7%,MAE 降低 8.6%;
GLONASS 系 统 多 频 反 演 结 果 较 其 最 佳 频 段
L2C 相 关 性 提 高 1.0%,RMSE 降 低 5.3%,MAE
降低 0.9%;Galileo 系统多频反演结果较其最佳
频 段 L1X 相 关 性 提 高 2.3%,RMSE 降 低 7.0%,
MAE 降低 7.7%。此外,虽然单 GNSS 系统轨迹
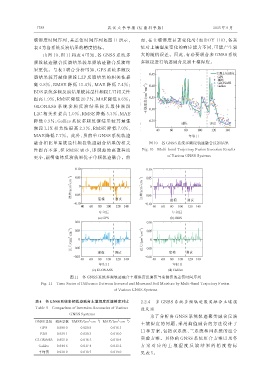
融合相比单系统最佳频段轨迹融合结果的相关 图 10 各 GNSS 系统多频段轨迹融合反演结果
性提高不多,但 RMSE 更小,即误差的离散程度 Fig. 10 Multi-band Trajectory Fusion Inversion Results
更小,说明整体反演效果优于单频轨迹融合。然 of Various GNSS Systems
图 11 各 GNSS 系统多频轨迹融合土壤湿度反演值与实测值的差值时间序列
Fig. 11 Time Series of Difference Between Inversed and Measured Soil Moisture by Multi-band Trajectory Fusion
of Various GNSS Systems
表 4 各 GNSS系统多频轨迹融合土壤湿度反演精度对比 2.2.4 多 GNSS 系统多频轨迹聚类融合土壤湿
Table 4 Comparison of Inversion Accuracies of Various 度反演
GNSS Systems
为了分析各 GNSS 系统轨迹聚类融合反演
3
3
GNSS 系统 相关系数 RMSE/(cm·cm −3 ) MAE/(cm·cm −3 )
土 壤 湿 度 的 问 题 ,采 用 熵 值 融 合 的 方 法 设 计 了
GPS 0.898 0 0.020 8 0.016 3
11 种方案,包括双系统、三系统和四系统的组合
BDS 0.929 1 0.020 3 0.016 0
实验方案。具体的 GNSS 系统组合方案以及各
GLONASS 0.952 0 0.016 2 0.010 9
Galileo 0.944 5 0.017 4 0.013 2 方 案 对 应 的 土 壤 湿 度 反 演 结 果 的 精 度 指 标
平均值 0.930 9 0.018 7 0.014 0 见表 5。