
Page 141 - 《武汉大学学报(信息科学版)》2025年第9期
P. 141
第 50 卷第 9 期 武帅莹等:一种基于 GNSS 和机器学习的 InSAR 大气改正方法 1869
图 5 K-means 分区结果情况
Fig. 5 Clusters for Interferogram Pairs Derived by K-means Algorithm
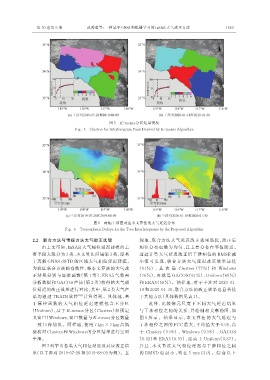
图 6 两幅干涉图对应本文算法的大气延迟分布
Fig. 6 Tropospheric Delays for the Two Interferograms by the Proposed Algorithm
2.2 联合方法与传统方法大气校正比较 观地,联合方法大气延迟改正效果最优,改正后
由上文可知,InSAR 大气相位延迟建模的主 相位分布也最为均匀,且主要分布在零值附近。
要手段大致分为 3 类,本文算法归属第 3 类,即基 通过计算大气延迟改正后干涉相位的 RMSE 减
于离散 GNSS dSTD 的区域大气相位延迟建模。 小 值 可 发 现 ,联 合 方 法 大 气 延 迟 改 正 效 果 最 优
为验证联合方法的有效性,将本文算法的大气改 (81%),其 次 是 Clusters(77%)和 Windows
正结果分别与幂律函数(第 1 类)、ERA5 气象再 (76%),再 就 是 GACOS(61%)、Uniform(60%)
分析数据和 GACOS 产品(第 2 类)获得的大气相 和 ERA5(58%)。同样地,对于干涉对 2020⁃01⁃
位延迟的改正效果进行对比,其中,第 2 类大气产 18 和 2020⁃01⁃30,联合方法的改正效果也显著优
品均通过 TRAIN 软件 [65] 计算得到。具体地,基 于其他方法(具体数值见表 1)。
于 幂 律 函 数 的 大 气 相 位 延 迟 建 模 包 含 不 分 区 此 外 ,比 较 像 元 尺 度 下 不 同 大 气 延 迟 结 果
(Uniform)、基 于 K-means 分 区(Clusters)和 预 定 与干涉相位之间的关系,并绘制相关泰勒图,如
义窗口(Windows,窗口数量与 K-means 分区数量 图 8 所 示 。 结 果 显 示 ,本 文 算 法 的 大 气 延 迟 与
一致)3 种情况。同样地,使用 7 km × 7 km 高斯 干涉相位之间的 PCC 最大,平均值大于 0.98,高
滤波对 Clusters 和 Windows 的分区结果进行空间 于 Clusters(0.96)、Windows(0.96)、GACOS
平滑。 (0.92)和 ERA5(0.93),远 高 于 Uniform(0.87)。
图 7 列举出各类大气相位延迟及对应改正结 并 且 ,本 文 算 法 大 气 相 位 延 迟 与 干 涉 相 位 之 间
果(以干涉对 2019⁃07⁃28 和 2019⁃08⁃09 为例)。直 的 RMSD 也 最 小 ,均 在 5 mm 以 内 。 综 合 以 上