
Page 138 - 《武汉大学学报(信息科学版)》2025年第9期
P. 138
1866 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 9 月
美 国 南 加 州 地 区 进 行 方 法 测 试 ,并 与 传 统 的 基
于相位-高程的幂律函数关系以及第 5 代气象再
分 析 数 据(ERA5)和 通 用 型 InSAR 大 气 校 正 在
线 服 务(generic atmospheric correction online ser⁃
vice for InSAR, GACOS)产 品 的 大 气 相 位 改 正
结 果 进 行 比 较 ,验 证 了 本 文 联 合 方 法 的 有 效 性
和可靠性。此外,通过对比和模拟实验,讨论了
影响联合方法大气延迟建模精度的因素及对于
GNSS 站点稀疏地区的可行性。
1 数据及研究方法
1.1 实验区域和数据
图 1 研究区域地形图
本文选取美国南加州地区(主要包括洛杉矶
Fig. 1 Topography of Study Area
与橙县)为研究区域,如图 1 所示。该地区西邻太
平洋,水汽含量丰富 [60] ,因此 SAR 观测成像受对 型去除干涉图中的地形相位分量;最后采用最小
流层延迟影响较严重;该地区的地形起伏较大, 费用流法 [62] 仅对相干性大于 0.5 的像素点进行相
从西部沿海到东部山脉,高差可达 0~3 500 m,地 位解缠,并将解缠后的相位值转换至视线向(line-
形与气象数据丰富,是研究 InSAR 大气改正方法 of-sight, LOS)位移(为方便起见,下文仍然称之
的理想实验场地。 为相位),用于后续大气改正实验。
本文选取 4 幅 Sentinel-1 卫星影像作为实验 美国南加州地区是世界上 GNSS 站点分布
数 据 ,其 中 夏 季(2019-07-28 和 2019-08-09)和 冬 最为密集且均匀的地区之一。本文所用 GNSS
季(2020-01-18 和 2020-01-30)各 两 幅 ,时 间 间 隔 ZTD 数据来自内华达大地测量实验室发布的采
为 12 d。利用瑞士 GAMMA 遥感公司开发的商 样率为 5 min 的产品。由于部分站点存在数据缺
业软件分别生成两对短时基线干涉图,如图 2 所 失情况,考虑到内插可能引入的误差,本文不建
示。在 InSAR 处理过程中,首先使用增强光谱多 议进行缺失数据的恢复,仅选择在 InSAR 影像获
样性算法去除因配准导致的条带不连续问题 [61] ; 取时刻有同步数据的站点。为用于 InSAR 干涉
其次在距离向和方位向上进行 20∶4 的多视处理; 图的大气改正,将干涉对日期所对应 GNSS ZTD
然 后 利 用 POD(precise orbit determination)精 密 数据两两相减获得差分 ZTD,并转换至 LOS 向,
轨道数据对初始轨道参数进行精化,通过引入航 最 终 得 到 GNSS 差 分 斜 距 向 大 气 延 迟(differen⁃
天飞机雷达地形测绘任务(shuttle radar topogra⁃ tial slant tropospheric delay, dSTD),如图 2 所示,
phy mission,SRTM)30 m 的 分 辨 率 数 字 高 程 模 其中纵轴为像素点个数,数值范围为 0~25 000。
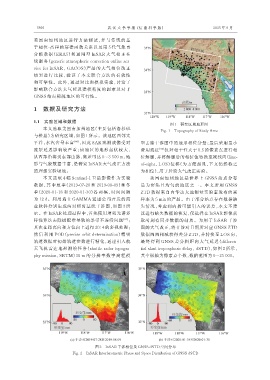
图 2 InSAR 干涉相位及 GNSS dSTD 空间分布
Fig. 2 InSAR Interferometric Phase and Space Distribution of GNSS dSTD